















-
OA:
https://www.energychina.press/ 开放科学(资源服务)二维码:
2095-8676 © 2021 Energy China GEDI. Publishing services by Energy Observer Magazine Co., Ltd. on behalf of Energy China GEDI. This is an open access article under the CC BY-NC license (
https://creativecommons.org/licenses/by-nc/4.0/ ). -
我国幅员辽阔,地理自然环境多变复杂,地震、泥石流、强降温雨雪冰冻天气近年来频繁在部分地区出现,自然灾害由于其作用范围广、强度大、持续时间长,造成的破坏巨大[1]。送电线路大多数设立在自然裸露的环境之下,面对自然灾害的不可抗力时,会发生导线断线、杆塔弯曲甚至倒断,引起线路跳闸停电,影响社会正常供电[2]。灾后现场清理,抢修恢复受损杆塔,对减少停电时间尤为关键。
受灾现场情况复杂,这对抢险人员的身体心理素质和专业技能都有非常高要求。抢险人员要在保证自己人身安全的情况下,对受灾现场进行全面准确地勘测,评估受灾情况,组织或协助清理行动障碍物,依据实际情况出具抢修复电方案。这些都需要抢险人员经过长期有效的训练,全面认识到输电线路运行的各项情况,掌握专业的知识能力,才能在受灾现场灵活、有效、快速地作出应对。
对于输电线路应急抢修技能的训练,虽然让学员直接在受灾现场培训是最直接有效的方式,但实际实施面临诸多难以克服的困难。首先,电力系统的运行维护操作本身具有特殊性,对操作正确性的要求非常高,操作失误所带来的损失将非常巨大[3];其次,由于受灾现场往往环境复杂特殊、危险点众多(灾害发生后,受灾现场一般伴随着泥石流、山体滑坡、树木倒塌、杆塔变形倾倒等多种潜在危险情况),对于学员(特别是经验不足的初学者)的人身安全存在重大威胁;最后,电力设施受损类特殊场景的实地构建,不仅成本高昂、风险不可控,并且技术上也往往难以实现。
为有效解决了高风险、高成本应急场景的实训难题,突破了场地和工器具等各方面的限制,本方案提出了一种基于CAVE虚拟现实技术的电网线路灾情勘察训练系统。本系统利用CAVE硬件环境的沉浸式视觉体验,配合声音效果与多种人机交互方式,使用户的感官与模拟操作得到逼真体验,为输电线路灾情勘察培训提供了一项全新的思路和方法。
-
虚拟现实(VR:Virtual Reality)技术,也称灵境技术或人工环境,是近几年来十分活跃的热门技术研究领域。虚拟现实技术通过计算机图形构成三维的数字模型,生成一种人为虚拟环境。这种虚拟环境以三维视觉感受为主,同时还可以引入听觉、触觉、嗅觉等综合可感知因素,从而使得体验者产生一种沉浸于这个环境的感觉,可以直接观察、操作、触摸、检测周围环境及事物的内在变化,并能与之发生“交互”作用,使人和计算机很好地“融为一体”,给人一种“身临其境”的感觉。
虚拟现实技术集成了计算机图形、计算机仿真、人工智能、传感、视频显示、网络通信、数字信号处理等多种科学技术,是一种由计算机生成的高技术模拟系统。它最早源于美国军方的作战模拟系统,九十年代初逐渐为各界所关注并且在商业领域得到了进一步的发展[4]。然而,受制于计算机性能、网络通信能力、三维显示等技术瓶颈和高昂的软硬件设备投入成本,虚拟现实技术一直无法得到广泛的工程应用。
近几年来,得益于计算机处理、网络通信、三维显示、传感交互等信息技术的快速发展,以及相关软硬件设备生产力的突飞猛进,虚拟现实技术逐渐突破了基础技术和生产成本的束缚,成为全球科技研究的热门领域,得到了众多科技公司的大力投入,在军事训练、工业设计及制造、教育、医疗、数字娱乐等诸多领域均得到了广泛的应用[5]。
-
CAVE,英文全称Cave Automatic Virtual Environment,中文译为“洞穴状自动虚拟系统”,是一种基于投影的高度沉浸式虚拟现实系统[6]。CAVE系统是以计算机图形学为基础,将高分辨率的立体投影显示技术、多通道视景同步技术、视角动态跟踪及捕捉技术、音响技术、传感器技术等有机结合,产生一个被三维立体投影画面包围的可供多人使用的完全沉浸式的虚拟环境。
CAVE系统是一种高标准的沉浸式虚拟现实系统。一方面,它克服了桌面式虚拟现实系统沉浸感低、交互性弱的固有缺陷;另一方面,与目前面向消费电子市场的头戴式虚拟现实设备(HTC Vive、Oculus Rift等产品)相比,CAVE系统具有分辨率高、佩戴设备轻便舒适、多人现场可协作等显著优势,系统设计更加符合人体工程学,整体用户体验(特别是长时间用户体验)更加优秀[7-8]。
CAVE虚拟现实技术具有分辨率高、沉浸感强、交互性好等诸多优势,同时技术本身又具备很强的通用性和易用性。因此,在建筑设计、工业设计、设备制造、虚拟驾驶、军事训练等高标准应用领域,CAVE系统开始普及成为高沉浸感的解决方案。
本文设计并实现了一种基于CAVE沉浸式仿真训练系统的电网线路灾情勘察训练系统。该系统在CAVE虚拟现实技术框架基础上,结合电力应急勘察训练实战需求,设计并实现了高度沉浸感的三维视觉体验场景和丰富的人机交互功能,让训练者能够逼真地模拟电网线路灾情勘察工作真实体验与操作,实现了传统训练方式无法达到的功能效果。
-
根据广东电网公司线路勘察、抢修等相关应急作业的训练需求,结合CAVE系统的技术特点,本方案设计并实现了一套“基于CAVE沉浸式仿真训练系统的电网线路灾情勘察训练系统”。
该系统总体功能是模拟自然灾害后,抢修人员对多种地理环境、电压等级、受损情况的电力线路设施进行故障情况勘察,训练抢修人员的观察能力、判断分析能力、决策处理能力和常用辅助工具的使用能力。
本方案所建设的CAVE系统,部署于一个尺寸约10 m×9 m的封闭室内空间,室内层高约5 m。系统部署后,参考效果图如图1所示。

图 1 CAVE系统参考部署效果图
Figure 1. Working sketches of the CAVE system
下面,本章节将从硬件系统、软件系统两个方面介绍本系统的设计与实现方案。
-
CAVE沉浸式仿真训练系统硬件分为5个子系统:立体显示系统、图形处理平台系统、位置跟踪系统、音响系统、模拟驾驶系统和中控系统。在中控系统的统一协调、调度下,六个子系统协同运行,共同实现硬件系统的各项功能。
CAVE沉浸式仿真训练系统硬件逻辑连接图如图2所示。

图 2 CAVE系统硬件架构图
Figure 2. Hardware structure diagram of the CAVE system
-
立体显示系统包括CAVE框架、投影幕、投影系统、主动立体眼镜等内容。下面对立体显示系统重要组成设备的选型与设计进行分析说明。
-
结合灾情勘察典型视角需求(步行、驾驶、无人机巡线三大主视角),为了实现充分良好的沉浸式视觉体验,CAVE系统设计为四面投影结构(正面、左侧面、右侧面和地面),如图3所示。

图 3 CAVE系统投影设计结构原理图
Figure 3. Schematic diagram of projection design in the CAVE system
本系统的投影光路设计具备以下特点:
1)一次反射结构:显著提高了空间利用率,将单台设备至投影幕的距离缩短了将近一倍(约1.2 m)。
2)背部投射结构:三面屏幕采用背部投射结构(投影设备位于屏幕后方),一方面降低了操作空间内容环境光对屏幕显示效果(色彩对比度、饱和度)的影响;另一方面,避免了操作空间内部署大体积电气设备对体验者视觉(光路干扰)、体感(散热气流)影响。
3)框架材料采用优质铝型材和钣金结构,表面经喷涂处理,耐用、防锈、美观。
在本系统中,各个投影区域尺寸和材料设计如表1所示。
表 1 投影区域参数说明
Table 1.
Parameter specification of the projection areas 序号 投影区域 屏幕尺寸(宽×高) 屏幕材料 1 正面 4×2.5 背投玻璃屏幕 2 左侧面 2.8×2.5 背投玻璃屏幕 3 右侧面 2.8×2.5 背投玻璃屏幕 4 地面 4×2.5 耐磨正投地幕 高质量的投影显示系统,需要在动态对比度、亮度均匀性、亮度以及最大半增益范围之间作出平衡设计。在本项目中,反射屏幕采用特殊的玻璃基质复合材料,相对于普通的玻纤、白塑类幕布,具有以下特点:
1)高系统对比度。高系统对比度,尤其是系统动态对比度,能够显示更丰富的图像细节。
2)高平整度与抗形变能力。屏幕平整度会对显示精度产生重要影响,本项目选择玻璃基质材料屏幕,平整度误差不超过1‰,定制的机械支撑结构,能够保证长期使用条件下不变形。
3)其他重要参数。为了保持图像质量的同时降低太阳效应、保证足够视场角度,项目选择了相对较低的屏幕增益系数(0.5),半增益角≥55°,可视角≥170°,屏幕表面环境光反射率≤2%。
-
投影机的参数设计与选型,是立体显示系统的关键因素之一。结合本项目显示画幅的尺寸、光路结构、屏幕类型与显示内容细节,本方案选择了业界先进的激光光源主动立体投影机。重要参数设计说明如下:
1)主动立体功能。投影机提供主动立体输入、处理和显示,通过倍频能输出最高120 Hz刷新率的立体图像。
2)高亮度激光光源。投影机选择最大光通量输出为13 000流明(ISO21118标准)的激光投影机,通过计算,屏幕平均亮度约200 cd/m2,保证现场工作照明存在的环境下(约100 lux),仍然能够有明亮鲜艳的色彩表现;光源类型为双色固态激光光源,一方面具有良好的稳定性,使用寿命可达2万 h;另一方面,可实现广色域范围与高色彩饱和度(满足REC.2020色彩显示标准)。
3)DLP(Digital Light Processing,数字光学处理)成像技术。DLP类型投影机采用数字反射式结构,具有清晰度高、画面均匀、色彩锐利、稳定性高等特点[9]。本系统投影机选择大尺寸DMD芯片(0.96'')的激光投影机,物理分辨率1 920×1 200,满足全高清、细腻的图像显示效果。
4)其他重要特色。投影机为工程专业投影机,提供任意角度安装、像素级别几何校正、亮度与色彩空间自动控制、大范围光轴偏移等高级功能,为立体显示系统的设计、安装、调试以及最终显示效果的实现,提供了不可或缺的硬件支撑。
-
本项目中,立体眼镜系统采用了业界领先的主动快门3D眼镜。主动快门式(Active Shutter 3D)3D眼镜,镜片是电控液晶屏,通过接收来自3D同步信号发射器的信号,由电路控制液晶开关状态,使左眼镜片控制只让左眼图像透过,右眼镜片让右眼图像透过。从而分离左右眼图像,在大脑里合成有视差的3D立体图像。相对于被动式(色差、偏光)和裸眼立体成像技术,主动快门式在图像立体感、色彩、亮度、分辨率以及生理舒适程度上具有显著优势[10]。
立体眼镜系统包含射频版立体眼镜、配套发射器,可以实现优质的三维立体显示效果。立体发射器采用2.4G无线端,发射距离可达30 m;主动立体液晶眼镜,内置锂电池,质量轻盈(总共约56 g),佩戴舒适,可满足75 h续航时间。
-
本系统中配备1台高性能工作站,配置P6000专业级别图形处理显卡,通过4个DP1.4视频接口,分别接入本系统4台投影机。NVIDIA的Quadro P6000显卡性能优秀,具备3 840个CUDA核心、4 GB GDDR5X显存,传输带宽高达432 GB/s,具备4个DP1.4接口,经过反复测试与验证,可完全满足驱动4面CAVE的显示要求。
-
为了实现训练体验者与CVAE系统多种人机互动功能,本方案配置了一套高精度定位跟踪与动作捕捉系统。该系统配备4个跟踪发射器,采用红外影像追踪技术来对人体的三维运动进行分析和重建。
其中,人体的三维运动跟踪点包括头部和手部追踪,分别对应安装定位器的立体眼镜和操作手柄,从而实现了人体视点和手部位置的空间漫游定位。操作手柄集成了6个按钮和1个操纵杆,实现了平移、旋转、缩放、抓取等丰富的交互功能。
虚拟现实空间的定位解决方案是利用高精度的 OptiTrack红外线(850纳米波长)三维运动捕捉系统,以每秒240帧的拍摄速率捕捉立体眼镜、交互手柄上固定的特制的标记点,能够实时精确地构建出人体的骨骼信息或标记点三维位置信息[11],为虚拟现实应用系统提供实时、精确的人体动作数据和道具位置数据(标记位置误差小于+/-0.20 mm)。OptiTrack三维运动捕捉系统架构图如图4所示。

图 4 OptiTrack三维运动捕捉系统架构图
Figure 4. Structure diagram of OptiTrack 3D motion tracking system
-
在本项目CAVE系统中,汽车模拟驾驶训练也是线路勘察训练中的一项重要目标和功能。移动驾驶舱选用高精度的运动仿真模拟器,可以精确地模拟出汽车行驶过程中,驾驶者所感受到的路面颠簸、车体倾斜、运动加速度、碰撞、飞跃、换挡冲击等感受。
本设备采用了先进的电机驱动技术和运动控制算法,保证了动感响应速度和频率(运动响应时间为2.5 ms)。在结构上,经过严密设计和论证,具有大负载和高速响应能力,在剧烈运动中,结构仍然稳定、无噪音。驾驶模拟器功能结构示意图如图5所示。

图 5 驾驶模拟器功能结构示意图
Figure 5. Schematic diagram of driving simulator in the CAVE system
-
结合本项目场地布局、环境和扩声需求,本方案配置了一套基于数字化处理平台的音响扩声系统。系统设计包括音频处理器、功放、扬声器等设备,可实现清晰、饱满、声压均匀的立体声扩声效果,进一步提高训练者的沉浸感体验。
-
中控系统负责对系统各类硬件设备进行统一控制与管理。本系统配置了一台硬件架构中控系统主机。该主机具备RS232\485、TCP\IP、红外、I\O等丰富的控制协议接口,可以满足对CAVE系统相关所有设备的接入与控制(投影机、音响系统、灯光系统、工作站系统、机柜设备等)。
同时,本方案将开发一套基于移动触摸终端的控制软件,可以通过部署于移动平板设备的图形化界面,对CAVE系统进行方便快捷、直观形象的控制操作。
-
软件系统采用了典型的C\S架构(系统架构图如图6所示)。

图 6 CAVE软件系统架构图
Figure 6. Software structure diagram of CAVE system
用户在CAVE空间的所有运动和操作,通过动作捕捉系统、操作手柄进行采集并传输至控制PC,PC客户端程序通过HTTP网络传输协议将信息传输到网络服务器(WebServer)上;然后,网络服务器将数据传输到应用服务器(Application Server)。应用服务器通过Tomcat服务,一方面将数据传输给数据库服务器(DatabaseServer),保存在Mysql数据库中;另一方面,传输给缓存服务器(CacheServer)进行高速缓存反馈。
-
本项目虚拟现实应用开发平台为Unity3d。
Unity3d是由Unity Technologies开发的一个针对三维视频游戏、建筑可视化、实时三维动画、虚拟现实等类型互动内容的开发工具,是一个功能强大、全面整合的专业虚拟现实引擎,也是当前全球市场上应用范围最广、市场占有率最高的虚拟现实系统开发平台[12]。
-
勘察技能训练主要包含勘察准备、勘察巡检、勘察汇报三个阶段训练内容及考核评分功能,具体如图7所示。

图 7 技能训练系统软件功能模块
Figure 7. Functional modules of skill training system software
-
模拟勘察作业人员接到PDA(个人手持终端)上的任务指令,系统便开始倒计时,勘察人员准备执行任务。
-
在装备库房存放货架上选择个人装备。
-
在装备库房交通工具存放区选择交通工具。
-
在允许使用越野车辆模拟器路段,用户可选择驾驶车辆,也可下车进行观察,驾驶车辆的方式有:手柄驾驶操作、模拟器驾驶操作。
-
在驾驶车辆、步行及其他行进方式过程中,设置导线断落、水坑导电、树木倾倒等安全风险,用户需要预先观察发现并发出指令进行规避、处置。
-
行进过程中,向队员发布操作巡检装备、躲避安全风险、记录勘察情况等指令,勘察小组成员根据指令执行对应命令。
-
行进过程中,望远镜、无人机、测距仪、PDA等装备需要用户直接操作使用,主要用于在接近电网设备时的受损状态观察及确认。
-
观察并发现主网及配网混凝土杆断裂、倒杆、斜杆、横担变形、铁塔弯曲、变形、导线断股、损伤、绝缘子串损坏等灾害情况(各类受损状态可随机组合并出现在多个地点)。
-
通过PDA进行受损部位拍照、记录,全部检查完后,填写相关信息,并发送上报。
-
系统对不同角色的操作过程进行自动考核、评分。考核评分分为以下两个维度:
1)失败项:驾驶交通工具时,造成翻车等事故;超过到达规定时间;队员因为安全风险造成人身损伤等。
2)扣分项:受损状态上报不完全、内容不完整或不正确;个人装备选错、多选、漏选等;交通工具选错等。
-
本节以勘察技能训练为例,对软件场景进行测评。评测场景主要包含勘察准备、勘察巡检、勘察汇报三个阶段训练内容,以及考核评分功能,工作流程如图8所示。

图 8 测评工作流程图
Figure 8. Workflow chart
-
进入线路勘察场景后,选择勘察作业人员角色后,会接到PDA上的任务指令(如图9所示),系统便开始倒计时,勘察人员准备执行任务。

图 9 任务指令
Figure 9. Task instruction
-
在PDA上“确认并继续”后,系统自动跳转至装备库场景,在装备库房存放货架上选择个人装备(如图10所示)。根据角色对应分工,训练人员可以360度漫游观察仓库储备,选择并拾取正确装备。

图 10 工具选择
Figure 10. Tool selection
-
选好接下来要使用的装备后,离开装备库前,需要选择交通工具(如图11所示)。此处有五类功能车辆可供选择,分别是:指挥通信车、救援车、吊车、应急发电车、UPS电源车。

图 11 车辆选择
Figure 11. Vehicle selection
-
点击门口的“出发”按钮,系统默认以第三人称视角开启驾驶模式,用户将开车前往灾害现场。在允许使用车辆路段,学员可选择驾驶车辆,也可下车进行观察。路面将模拟灾害后树木倒塌拦路、路面坑洼\起伏\泥泞等常见灾害后路面状况,用户通过实物驾驶模拟器实现特殊路况驾驶技能训练(如图12所示)。

图 12 驾驶培训
Figure 12. Driving training
-
用户使用在仓库选取的个人装备进行灾情观察,需要关注主网及配网混凝土杆断裂、倒杆、斜杆、横担变形、铁塔弯曲、变形、导线断股、损伤、绝缘子串损坏等灾害情况、受损状态。过程中可使用望远镜、无人机等设备进行详细观察(如图13所示)。

图 13 望远镜险情观察
Figure 13. Danger observation with telescope
-
在受灾现场发现倒塌的电线杆并下车进行相应的应急处理(如图14所示)。此处进行“围蔽”处理(如图15所示)。

图 14 险情处理
Figure 14. Danger treatment

图 15 围蔽险情
Figure 15. Enclosing danger
-
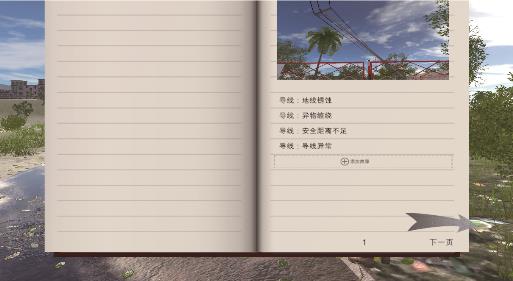
通过PDA进行受损部位拍照,全部检查完后,将所有遇到的险情记录在“笔记本”上(如图16所示),并发送上报。

图 16 事件记录
Figure 16. Event recording
-
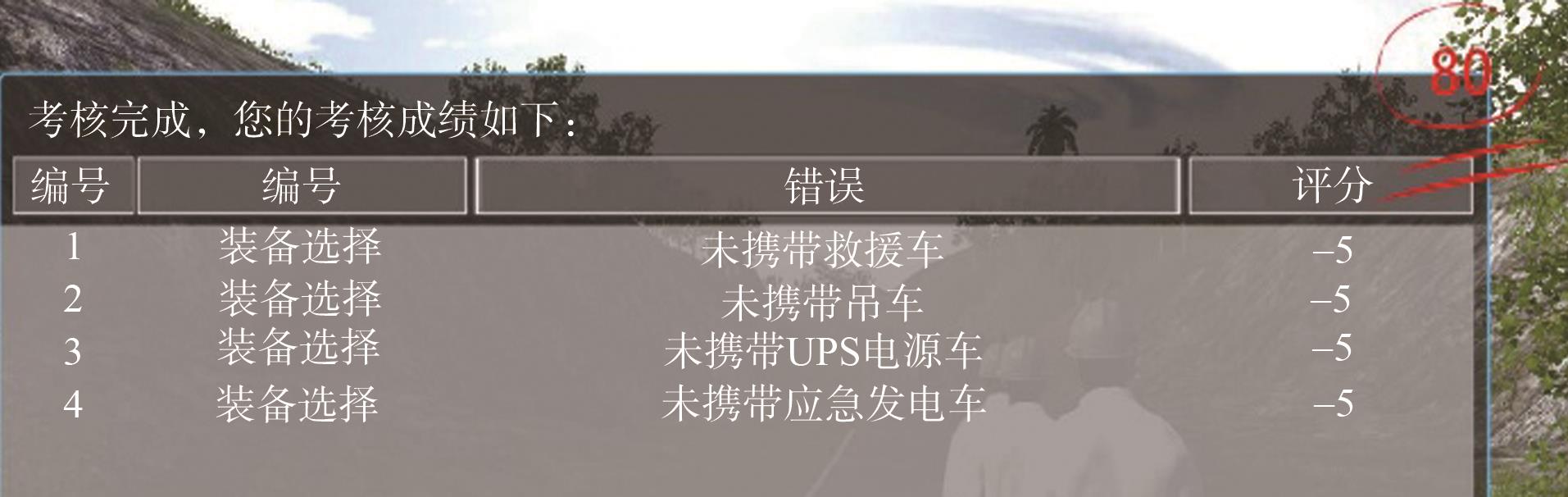
以上流程完成确认后,系统将对本次操作进行自动考核评分,如图17所示。本次勘察训练评分情况如下:

图 17 培训得分
Figure 17. Training score
(1)未携带救援车,扣5分;(2)未携带吊车,扣5分;(3)未携带UPS电源车,扣5分;(4)未携带应急发电车,扣5分。总共得分80分。
以上评测过程,展示了本次勘测训练能够系统地训练、考核:
1)灾情勘察应急装备、交通工具选择。
2)特殊路况越野驾驶。
3)各类灾情勘察装备的应用场景与方式。
4)各类灾害现场的观察、判断、现场处置与信息反馈汇报。
-
以上评测过程可以体现,本训练系统勘察流程完整,考察知识点全面,形式生动有趣,完全满足输电线路灾情勘察技能训练的需求。
与现场观摩,课堂学习等传统的培训方式相比,CAVE沉浸式训练系统具备如下优势。
1)CAVE沉浸式训练系统能通过提供多维度的感官与交互体验,为学员营造出野外灾情勘察的真实环境。视觉方面,用户被超过270°视角的高分辨率、3D的全彩色虚拟环境包围,虚拟环境视角随着观察视点的变化同步变化,实现了高沉浸感的视觉体验;人机交互方面,系统提供了空间漫游手柄和仿真驾驶座椅,学员与虚拟环境交互的直观、丰富、自然,符合人的信息反馈习惯;听觉方面,通过双通道立体声扩声系统,营造了听觉上高度沉浸感。CAVE技术强烈的沉浸感可以使学员暂时与现实世界隔离,全身心的投入到培训之中。
2)抗灾勘测任务种类繁多,灾害类型及发生的地点复杂多变,应对各种情况所使用的工具装备也组合多样,并且有不断更新换代的需求,导致勘察作业流程复杂,并在实践中需要不断地优化调整、更新升级。虚拟现实技术本身天然具有数字化、软件化特点,借助计算机AI功能,可以灵活实现多种训练场景的随机生成,训练、考核过程更加灵活、客观、高效,并且能够平滑地对系统进行优化、升级和拓展,对比传统的书本培训和师傅带徒的形式,更能适应当今时代电力系统应急能力训练的需求。
3)受灾现场往往环境复杂特殊、危险点众多(灾害发生后,受灾现场一般伴随着泥石流、山体滑坡、树木倒塌、杆塔变形倾倒等多种潜在危险情况),对于学员(特别是经验不足的初学者)的人身安全存在重大威胁;电力设施受损类特殊场景的实地构建,不仅成本高昂、风险不可控,并且技术上也往往难以实现。室内场景使用的CAVE仿真系统有效解决了高风险、高成本应急场景的实训难题,突破了场地和工器具等各方面的限制。
4)对于学员来讲,CAVE仿真系统可以提供单人\多人培训模式,沉浸式、交互式的培训体验能显著提高学员的培训参与度和积极性;对于教员来讲,系统能够以三维视频的形式演示规范操作过程、回放错误细节,自动统计分析学员各项考核指标,将教员从大量重复繁琐的人工讲解、演示和考评工作中解脱出来,提高了教学工作效率。因此,无论从学员还是教员角度,CAVE仿真系统都是一种更加先进科学、灵活高效的培训方式。
-
虚拟现实技术在仿真模拟、远程巡检、培训演练等方面正在被越来越多地关注、研究与应用,与云计算、5G、人工智能等热门前沿技术一起,正在成为智能制造、提质增效的重要助力。在电力应急抢修这一特殊而重要的领域,本文创新地提出了一种基于CAVE沉浸式虚拟现实技术的电网线路灾情勘察训练系统。文章从系统设计开发背景、虚拟现实技术发展应用情况、硬件系统架构、软件系统架构、系统评测等方面对本系统进行了详细地说明与分析。
本系统具有视觉沉浸感强、多维度体验、人机交互性良好、场景营造自由度高等多项优势,为输电线路勘察训练工作提供了一个全新的方式,弥补了传统书面教学、现场实操方式的局限性,解决了高危险、高成本的应急场景实训难题,具有极大的应用前景和价值。
1)CAVE沉浸式虚拟现实技术的电网线路灾情勘察训练项目,流程清晰完整,知识点涵盖全面,充分满足输电线路勘测培训的需求。
2)CAVE沉浸式虚拟现实技术对比传统培训方式(书面教学与现场实操)有具有明显的技术优势,可以自由营造高危、复杂等特殊抢修救援场景,培训手段生动形象,过程安全,并且可以灵活针对需求的更新进行拓展与升级。
下一步,本系统将聚焦新型传感器、人工智能等领域,在多系统联动、关节手势精细捕捉、地理场景AI生成等方面继续探索,进一步丰富完善系统功能,提高用户体验与训练效果。
Design and Implementation of Disaster Investigation Training System for Power Grid Line Based on CAVE Virtual Reality Technology
-
摘要:
目的 为了提升电网应急抢修队伍的电网线路灾情勘察技能,设计并实现了一种CAVE虚拟现实训练系统,为电网线路灾情勘察训练提供了新的思路。 方法 文章详细介绍了该系统的软硬件实现方案,并通过典型测试用例,对该系统进行了全面的测评。 结果 研究表明:借助创意与先进的技术,本系统应用效果显著,能充分满足技能培训要求。相比于传统培训方式,CAVE虚拟现实系统具有视觉沉浸感强、多维度体验、人机交互性良好、特殊场景营造自由度高等多项优势。 结论 CAVE虚拟现实系统,为电网灾情勘察技能培训提供了一项效果显著的全新方法,并且为其他相关领域的技能训练实施模式提供了重要参考。 Abstract:Introduction In order to improve the disaster investigation ability of power grid emergency repairing team, this paper proposes a design and implementation of CAVE virtual reality technology, which provides a new train of thought for training power grid disaster investigation skills. Method Hardware and software solutions of the system were described in detail. Besides, a comprehensive evaluation was applied and described by utilizing typical test cases. Result By using innovative and advanced technologies, the sysetem reaches significantly effective results, which can fully meets the training requirements. In addition, compared with traditional training method, CAVE virtual reality technology system has many advantages, such as strong visual immersion, multi-dimensional experience, good human-computer interaction, and high freedom in creating special scenes. Conclusion The CAVE virtual reality system brings a new and effective method for training power grid disaster investigation skills,and provides an important reference for skill training implementation mode in relavant fields. -
Key words:
- power grid line /
- emergency repair /
- disaster investigation /
- virtual reality /
- CAVE
-
图 4 OptiTrack三维运动捕捉系统架构图
Fig. 4 Structure diagram of OptiTrack 3D motion tracking system
表 1 投影区域参数说明
Tab. 1.
Parameter specification of the projection areas 序号 投影区域 屏幕尺寸(宽×高) 屏幕材料 1 正面 4×2.5 背投玻璃屏幕 2 左侧面 2.8×2.5 背投玻璃屏幕 3 右侧面 2.8×2.5 背投玻璃屏幕 4 地面 4×2.5 耐磨正投地幕  下载: 导出CSV
下载: 导出CSV
-
[1] 刘清冰. 对送电线路自然灾害处理的认识及其管理 [J]. 山东工业技术,2014(13):240-241. LIUQ B. Understanding and management of natural disaster treatment of power transmission line [J]. Shandong Industrial Technology, 2014(13):240-241. [2] 林土方,许家益,沈淼. 架空配电线路防灾减灾技术研究 [J]. 安徽电气工程职业技术学院学报,2016,21(1):49-55. LINT F, XUJ Y, SHENM. Technology of disaster prevention and reduction of overhead power lines [J]. Journal of Anhui Electrical Engineering Professional Technique College, 2016, 21(1):49-55. [3] 陈海波,郑健,费瑞轶,等. 虚拟现实技术在电力系统中的典型应用 [J]. 电网与清洁能源,2016,32(2):20-25. CHENH B, ZHENGJ, FEIR Y,et al. Virtual reality and its application in electric power System [J]. Power System and Clean Energy, 2016, 32(2):20-25. [4] 张文波,曹雷,熊君君.虚拟现实技术的现实挑战 [J].中国科学:信息科学,2016,46(12):1779-1785. ZHANGW B, CAOL, XIONGJ J. The challenging facts of virtual reality technology [J]. Science China: Information Sciences, 2016,46(12):1779-1785. [5] 庄春华,王普. 虚拟现实技术及其应用 [M]. 北京:电子工业出版社,2016. ZHUANGC H, WANGP. Virtual reality technology and its application [M]. Beijing: Electronic Industry Press, 2016. [6] CRUZ-NEIRAC , SANDIND J , DEFANTIT A . Surround-screen projection-based virtual reality: the design and implementation of the CAVE [C]//Anon. Proceedings of the 20th Annual Conference on Computer Graphics and Interactive Techniques, Anaheim CA, September 1993. Anaheim: [s.n.], 1993:135-142. [7] KANB C, ZHAOY, WANGS G. A 3D video visual comfort evaluation method on the consistency of accommodation and convergence [J]. Optoelectronics letters, 2017, 13(3):233-236. [8] 王涌天,程德文,许晨. 虚拟现实光学显示技术 [J]. 中国科学:信息科学,2016,46(12):1694-1710. WANGY T, CHENGD W, XUC. Display technologies in virtual reality systems [J]. Science China: Information Sciences, 2016, 46(12):1694-1710. [9] 胡坚. DLP和LCD投影机对比分析 [J]. 微计算机信息,2005(22):145-147. HUJ. A contrastive study between DLP and LCD projectors [J]. Microcomputer Information, 2005(22):145-147. [10] 王永,孙可,孙士祥. 3D显示技术的现状及发展 [J]. 现代显示,2012(2):26-29. WANGY, SUNK, SUNS X. The status and development of 3D display technology. Advanced Display. 2012(2):26-29. [11] 王俊威,西勤,冯其强,等. OptiTrack系统点位测量的精度测试 [J].北京测绘,2017(增刊1):294-300. WANGJ W, XIQ, FENGQ Q, et al. Precision testing of OptiTrack system for point measurement [J]. Beijing Surveying and Mapping, 2017(Supp.1):294-300. [12] 张金剑. Unity3D游戏开发与设计案例教程 [M]. 北京:清华大学出版社,2015. ZHANGJ J. Case tutorial of game development and design with Unity3D [M]. Beijing: Tsinghua University Press, 2015. -

 点击查看大图
点击查看大图

图(17) / 表 (1)
计量
- 文章访问数: 383
- HTML全文浏览量: 129
- PDF下载量: 45
- 被引次数: 0
