


-
风能是环境友好型的清洁能源,在能源供应领域发挥着重要作用[1-2]。然而,传统近地风能项目在满足日益增长的电力需求时,仍存在如风力涡轮机轮毂高度约束等诸多技术限制[3-4]。基于空中风力发电技术突破而开发的高空风能项目开辟了风电领域的新赛道。目前,全球已有超过50家研发公司与数十个研究机构展开高空风力发电系统(Airborne Wind Energy systems,AWEs)相关的控制、电子和机械设计研究,国内首个AWEs示范电站已于安徽芜湖建立并实现稳定发电[5-6]。
根据风能捕获与机电能量转化方式的不同,AWEs的技术路线可分为陆基和空基2种方式。陆基AWEs通过飞行组件带动缆绳往复牵引地面发电机运转实现发电;空基AWEs则利用飞行器将风力涡轮机送至高空,通过空地能量传输完成电能输出[7-8]。伞梯式陆基AWEs是中国对AWE技术发展的全新探索,是一项具有前沿性、颠覆性的新型风力发电技术,在大型化、轻量化、安全性等方面具有明显优势[9]。如图1所示,伞梯式陆基AWEs由氦气球、平衡伞、做功伞、地面卷扬-发电机组等基本元件组成。
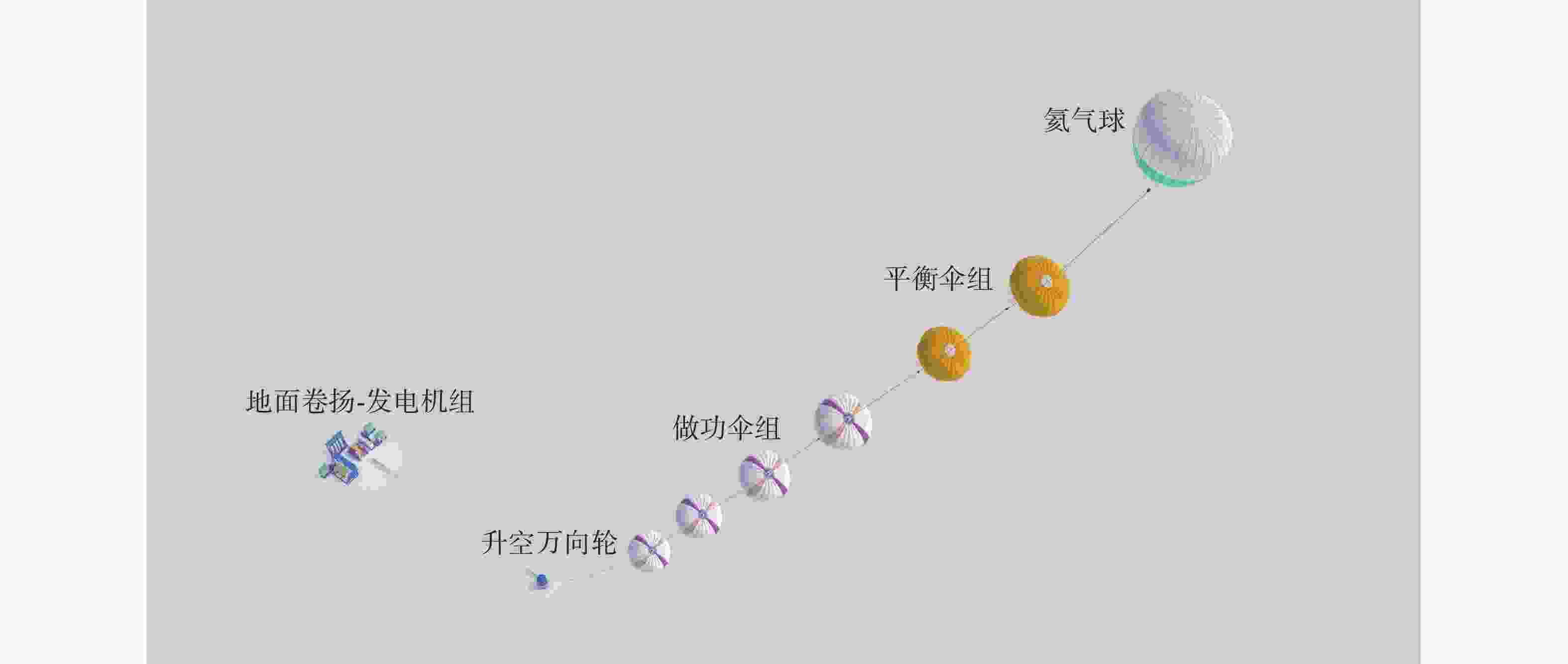
图 1 伞梯式陆基AWEs结构示意图
Figure 1. Kite train ground-based AWEs structural diagram
如图1所示,机组利用特殊设计的做功伞以捕获高海拔区域风能,并通过牵引缆绳将风力传输至地面卷扬-发电机组,实现高空风能的捕获、转化和利用。受技术和工程经济性限制,其结构尺寸也必然伴随着功率等级而变化[10]。由于伞梯式陆基AWEs用缆绳取代了传统风机的塔架结构,因此,机载系统需要保持升力并指向来风,以便在动态变化的风场和天气条件下长时稳定运行。此外,鉴于该技术的高度自主性与创新性,有必要进一步研究如何提高最终生产系统的安全稳定性,使伞梯式陆基AWEs与其他能源相比更具竞争力。
目前,国内尚缺少伞梯式陆基AWEs技术稳定运行控制的研究成果,该技术仍存在无成熟控制系统建模方案、运行依赖人工手动控制和伞梯群间缺少协同等技术难题,如何确保其安全地、稳定地运行成为亟待解决的问题。文章以中国能源建设集团参与建设运营的安徽某伞梯式陆基AWEs发电站示范工程为研究对象,开展高空风电控制系统建模与同步控制方法研究,以实现伞梯式陆基AWEs在高空风场动态环境中的安全高效运行,为高空风力发电站工程自动安全控制运行策略提供参考。
-
动力学模型是伞梯式陆基AWEs设备和控制设计的关键基础。本节将建立适用于伞梯式陆基AWEs空中设备的坐标系,并基于有限段的方法建立系统缆绳的多刚体绳索模型[11]。
-
构建地面坐标系、伞体相对坐标系和伞体对风坐标系以表征空中伞体位置,为建立伞梯式陆基AWEs动力学模型奠定基础。
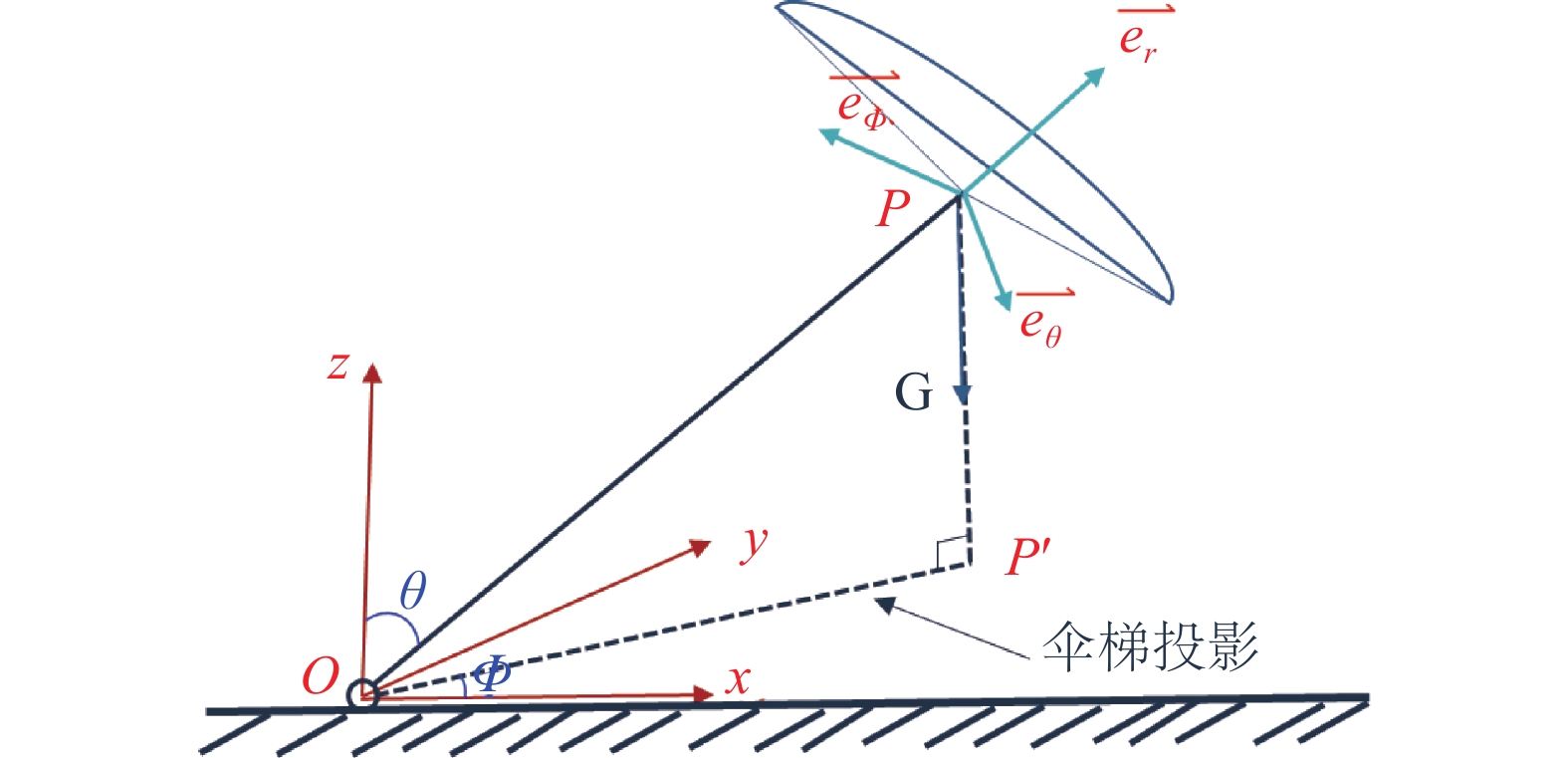
1)地面坐标系:以系统的单伞动力学模型为例,构建如图2所示的地面参考坐标系,3个坐标系向量均统一于该坐标系。如图,$ {{O}} $为坐标系原点,在本文中代指卷扬-发电机组坐标系位置,$ {{P}} $为伞组设备质心坐标系位置,$ {{P}}' $为伞组设备质心在水平面的投影位置。(结合项目实况,x轴指向地理东方,y轴指向地理北方,分别描述伞组设备在水平面上东西向和南北向移动;z轴垂直于x轴和y轴,竖直向上)。
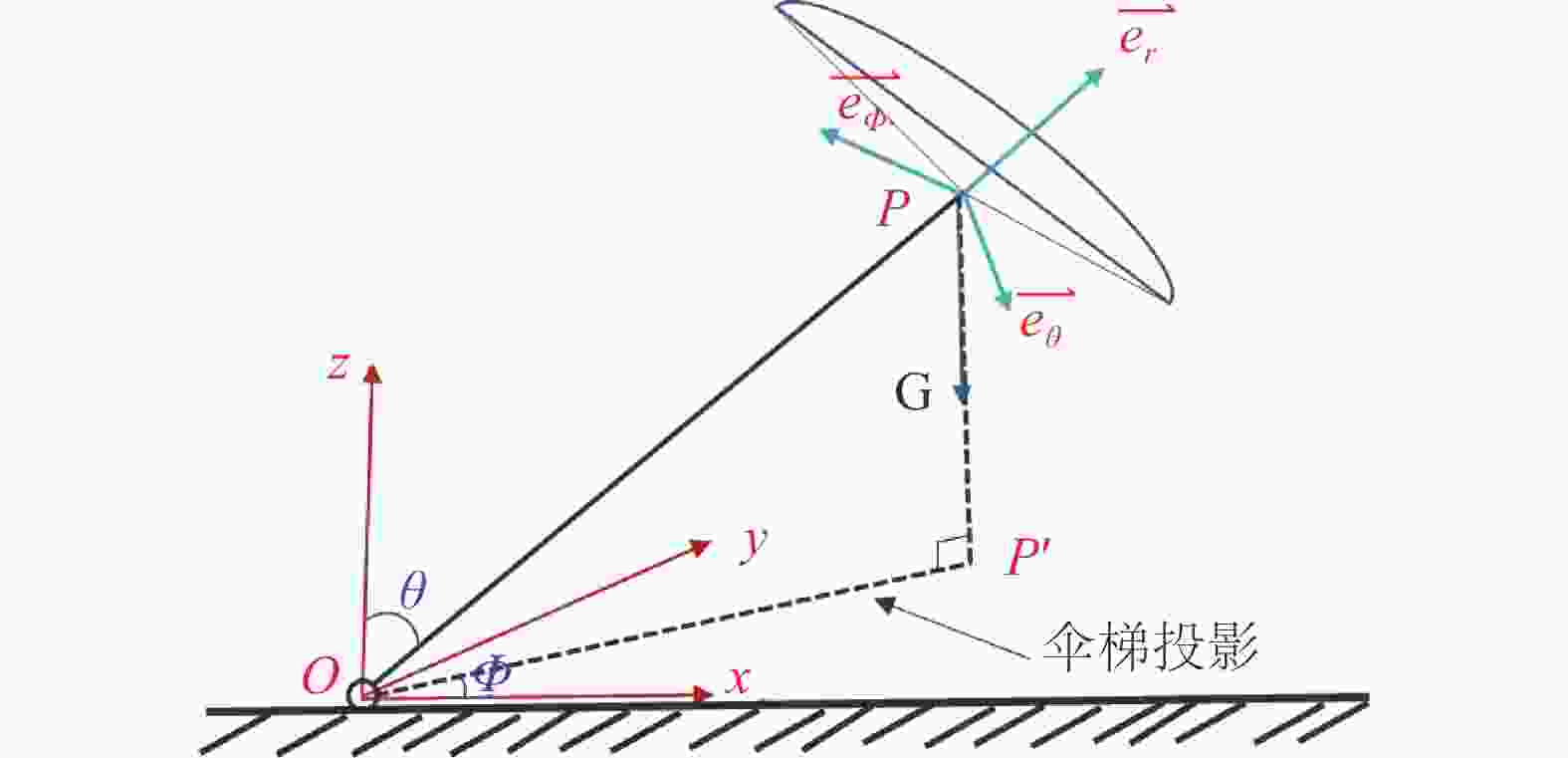
图 2 单伞坐标系示意图
Figure 2. Single kite coordinate system diagram
2)伞体相对坐标系:以空中伞体的质心为原点构建伞体相对坐标系以表征伞体极坐标$ (\theta ,\varPhi ,r) $的变化。$ \overrightarrow {{e_r}} $表示缆绳长度$ r $变化的正方向,$ \overrightarrow {{e_r}} = \dfrac{{\overrightarrow {{{OP}}} }}{{\left\| {\overrightarrow {{{OP}}} } \right\|}} $;$ \overrightarrow {{e_\theta }} $表示坐标$ \theta $变化的正方向,处于平面$ {{OPP}}' $内,且$ \overrightarrow {{e_\theta }} \bot \overrightarrow {{e_r}} $;$ \overrightarrow {{e_\varPhi }} $表示伞体投影$ \overrightarrow {{{OP}}'} $与水平$ x $轴方向夹角$ \varPhi $变化的正方向,$ \overrightarrow {{e_\varPhi }} = \dfrac{{\overrightarrow {{{OP}}} \times \overrightarrow {{{P}}'{{P}}} }}{{\left\| {\overrightarrow {{{OP}}} \times \overrightarrow {{{P}}'{{P}}} } \right\|}} $。
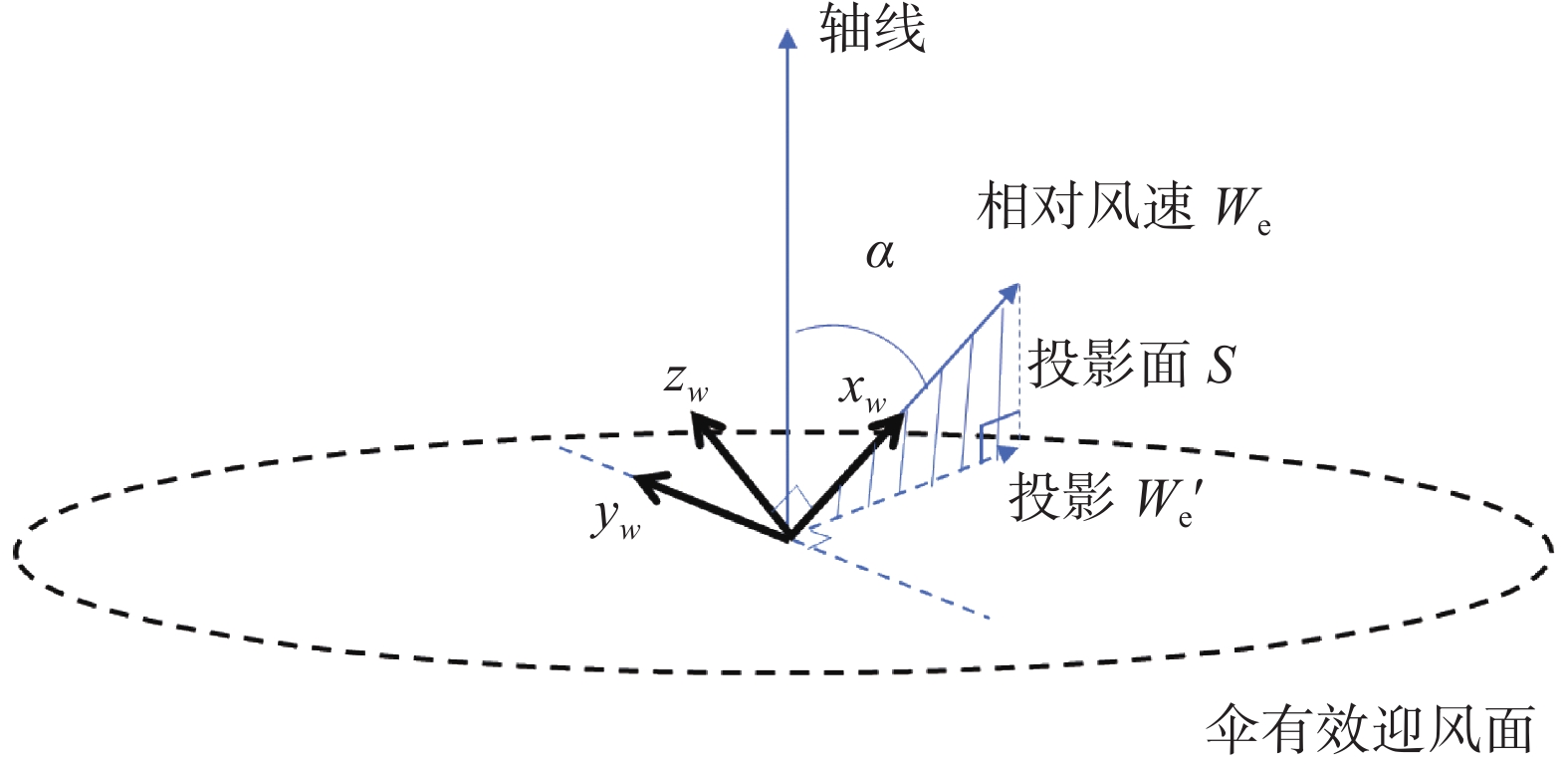
3)对风坐标系:如图3所示,坐标系原点位于伞的质心;伞所受气动阻力方向与相对风速$ {{{W}}_{\mathrm{e}}} $平行;气动阻力$ {F_{\mathrm{D}}} $和气动升力$ {F_{\mathrm{L}}} $在投影面$ S $内,且$ {F_{\mathrm{L}}} \bot {F_{\mathrm{D}}} $。则记$ {{{x}}_w} $,$ {{{y}}_w} $和$ {{{\textit z}}_w} $为对风坐标系的坐标轴。
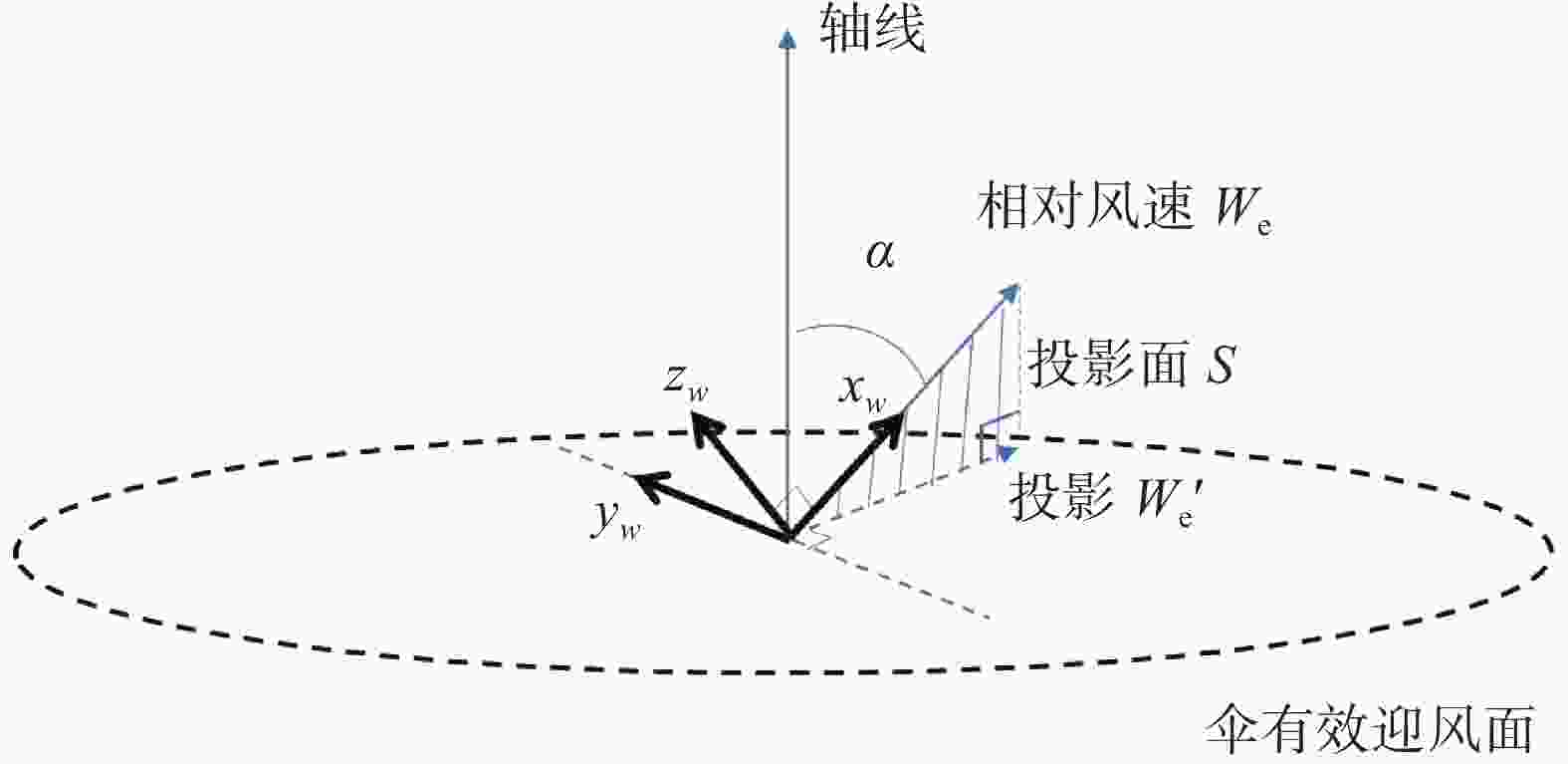
图 3 对风坐标系示意图
Figure 3. Wind coordinate system diagram
-
考虑到伞梯式陆基AWEs运行过程中,缆绳为具有一定柔性的非刚体,在高空风场环境中难以保持直线形状。因此,使用有限段方法建立主缆绳的多刚体绳索模型,以更真实地模拟伞梯式陆基AWEs的动力学行为。
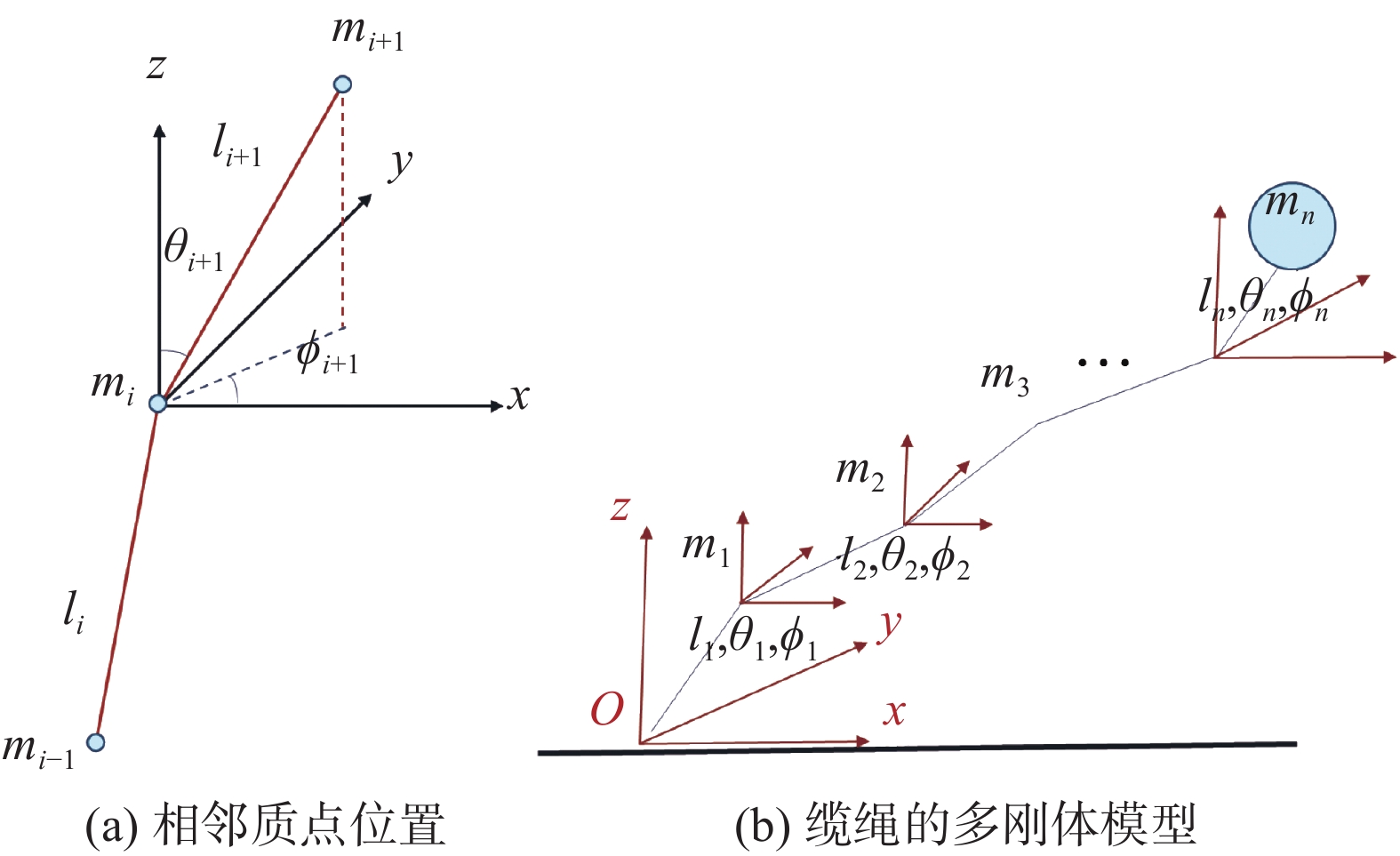
如图4所示,将柔性的、线密度均匀的缆绳离散为n段,每一段假定为细长的刚性杆,其质量分布在段的末端。在上述假设的前提下,缆绳被视为为开链式多刚体系统。本节假设缆绳各个节点只受重力以及系统内部约束力的作用。则缆绳各节点间位置、速度和加速度的地面坐标系表示如式(1)-式(3)所示。
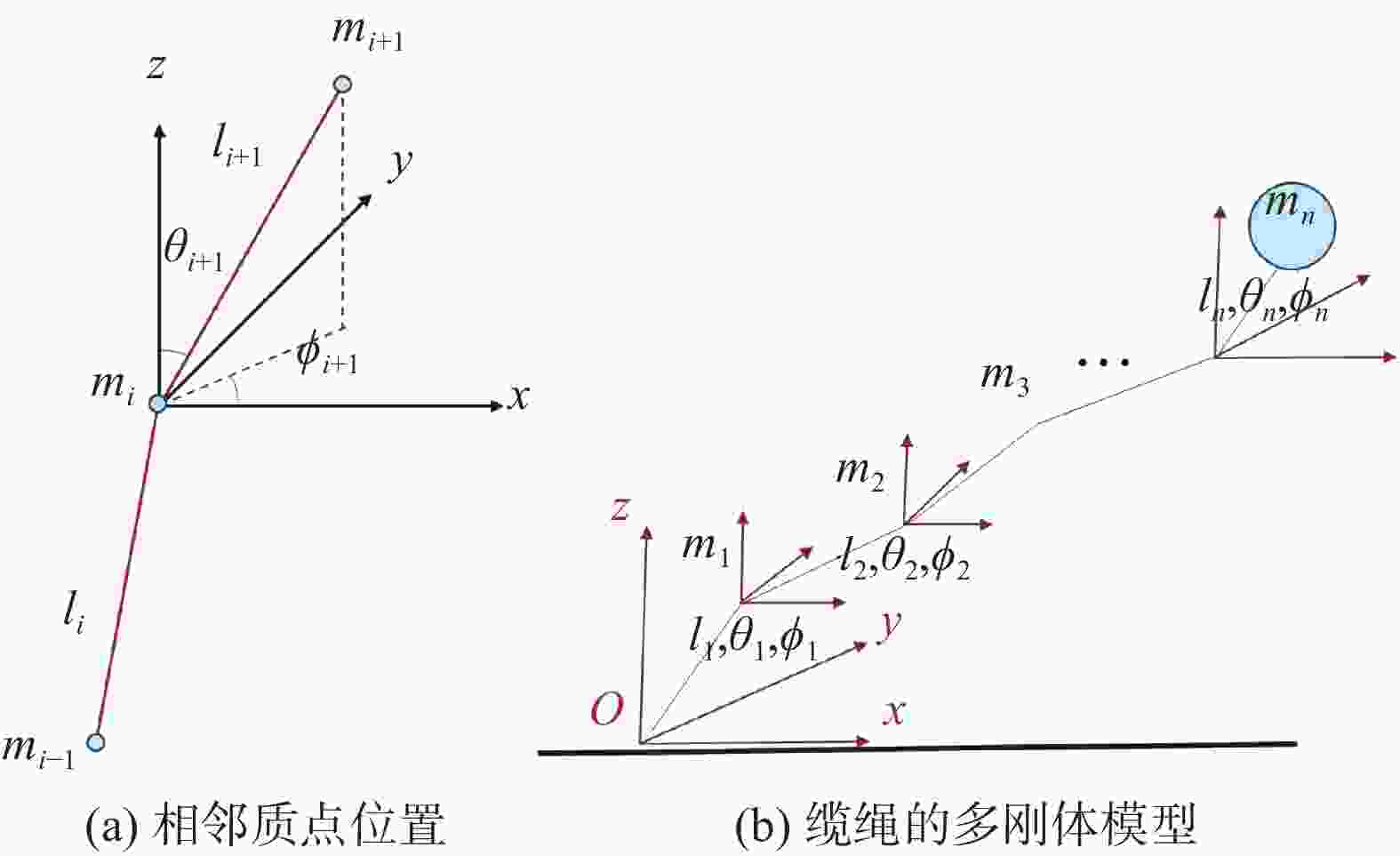
图 4 多刚体模型中相邻质点的位置关系与缆绳的多刚体模型示意图
Figure 4. The positional relationship between adjacent mass points in the multi-rigid body model and the multi-rigid body model of the cables schematic diagram
$$ \left[ {\begin{array}{*{20}{c}} {{x_{i{\text{ + 1}}}}} \\ {{y_{i{\text{ + 1}}}}} \\ {{{\textit z}_{i{\text{ + 1}}}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {{x_i}} \\ {{y_i}} \\ {{{\textit z}_i}} \end{array}} \right] + \left[ {\begin{array}{*{20}{c}} {{l_{i{\text{ + 1}}}}\sin ({\theta _{i{\text{ + 1}}}})\cos ({\phi _{i{\text{ + 1}}}})} \\ {{l_{i{\text{ + 1}}}}\sin ({\theta _{i{\text{ + 1}}}})\sin ({\phi _{i{\text{ + 1}}}})} \\ {{l_{i{\text{ + 1}}}}\cos ({\theta _{i{\text{ + 1}}}})} \end{array}} \right] $$ (1) $$ \left[ {\begin{array}{*{20}{c}} {{{\dot x}_{i{\text{ + 1}}}}} \\ {{{\dot y}_{i{\text{ + 1}}}}} \\ {{{\dot {\textit z}}_{i{\text{ + 1}}}}} \end{array}} \right]{\text{ = }}\left[ {\begin{array}{*{20}{c}} {{{\dot x}_i}} \\ {{{\dot y}_i}} \\ {{{\dot {\textit z}}_i}} \end{array}} \right] + {\boldsymbol{E}}({\theta _{i{\text{ + 1}}}},{\phi _{i{\text{ + 1}}}})\left[ {\begin{array}{*{20}{c}} {{l_{i{\text{ + 1}}}}{{\dot \theta }_{i{\text{ + 1}}}}} \\ {{l_{i{\text{ + 1}}}}\sin ({\theta _{i{\text{ + 1}}}}){{\dot \phi }_{i{\text{ + 1}}}}} \\ 0 \end{array}} \right] $$ (2) $$ \begin{gathered} \left[ {\begin{array}{*{20}{c}} {{{\ddot x}_{i{\text{ + 1}}}}} \\ {{{\ddot y}_{i{\text{ + 1}}}}} \\ {{{\ddot {\textit z}}_{i{\text{ + 1}}}}} \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {{{\ddot x}_i}} \\ {{{\ddot y}_i}} \\ {{{\ddot {\textit z}}_i}} \end{array}} \right] + \dot {\boldsymbol{E}}({\theta _{i{\text{ + 1}}}},{\phi _{i{\text{ + 1}}}})\left[ {\begin{array}{*{20}{c}} {{l_{i{\text{ + 1}}}}{{\dot \theta }_{i{\text{ + 1}}}}} \\ {{l_{i{\text{ + 1}}}}\sin ({\theta _{i{\text{ + 1}}}}){{\dot \phi }_{i{\text{ + 1}}}}} \\ 0 \end{array}} \right] + \\ {\boldsymbol{E}}({\theta _{i{\text{ + 1}}}},{\phi _{i{\text{ + 1}}}})\left[ {\begin{array}{*{20}{c}} {{l_{i{\text{ + 1}}}}{{\ddot \theta }_{i{\text{ + 1}}}}} \\ {{l_{i{\text{ + 1}}}}\sin ({\theta _{i{\text{ + 1}}}}){{\ddot \phi }_{i{\text{ + 1}}}}{\text{ + }}{l_{i{\text{ + 1}}}}\cos ({\theta _{i{\text{ + 1}}}}){{\dot \theta }_{i{\text{ + 1}}}}{{\dot \phi }_{i{\text{ + 1}}}}} \\ 0 \end{array}} \right] \end{gathered} $$ (3) 其中,
$$ {\boldsymbol{E}} = \left[ {\begin{array}{*{20}{c}} {\cos (\theta )\cos (\varPhi )}&{ - \sin (\varPhi )}&{\sin (\theta )\cos (\varPhi )} \\ {\cos (\theta )\sin (\varPhi )}&{\cos (\varPhi )}&{\sin (\theta )\sin (\varPhi )} \\ { - \sin (\theta )}&0&{\cos (\theta )} \end{array}} \right] $$ (4) 式中:
(x, y, z) ——各节点在地面坐标系的位置坐标表示(m);
E ——旋转矩阵;
$ {l_i} $ ——第$ i $段缆绳长度(m);
$ \theta $ ——第$ i $段缆绳与竖直方向夹角(rad);
$ \phi $ —第$ i $段缆绳投影与水平轴方向夹角(rad)。
Kane方法由Kane在20世纪80年代提出[12],是一种用于描述和分析多体动力学系统的数学建模方法,现已成为研究机械系统动力学的重要工具之一[13-15]。基于Kane方法对上述多刚体系统建模。离散的n个节点Kane动力学方程如下:
$$ \left\{ \begin{gathered} {F_{\theta j}} + F_{\theta j}^* = 0,j = 1,2, \cdots n \\ {F_{\phi j}} + F_{\phi j}^* = 0,j = 1,2, \cdots n \\ \end{gathered} \right. $$ (5) $$ \left\{ \begin{gathered} {F_{\theta j}} = \sum\limits_{i = 1}^n {{F_{{\mathrm{ext}},i}} \cdot \dfrac{{\partial {v_i}}}{{\partial {{\dot \theta }_j}}}} \\ F_{\theta j}^* = \sum\limits_{i = 1}^n { - {m_i}{a_i} \cdot \dfrac{{\partial {v_i}}}{{\partial {{\dot \theta }_j}}}} \\ {F_{\phi j}} = \sum\limits_{i = 1}^n {{F_{{\mathrm{ext}},i}} \cdot \dfrac{{\partial {v_i}}}{{\partial {{\dot \phi }_j}}}} \\ F_{\phi j}^* = \sum\limits_{i = 1}^n { - {m_i}{a_i} \cdot \dfrac{{\partial {v_i}}}{{\partial {{\dot \phi }_j}}}} \\ \end{gathered} \right. $$ (6) $$ \dfrac{{\partial {v_i}}}{{\partial {{\dot \theta }_j}}} = \left\{ \begin{gathered} 0,i < j \\ \dfrac{{\partial {v_j}}}{{\partial {{\dot \theta }_j}}},i \geqslant j \\ \end{gathered} \right. $$ (7) $$ \dfrac{{\partial {v_i}}}{{\partial {{\dot \phi }_j}}} = \left\{ \begin{gathered} 0,i < j \\ \dfrac{{\partial {v_j}}}{{\partial {{\dot \phi }_j}}},i \geqslant j \\ \end{gathered} \right. $$ (8) 式中:
$ {F_{\theta j}} $ ——$ \theta $方向广义主动力(N);
$ F_{\theta j}^* $ ——$ \theta $方向广义惯性力(N);
$ {F_{\phi j}} $ ——$ \phi $方向广义主动力(N);
$ F_{\phi j}^* $ ——$ \phi $方向广义惯性力(N);
$ {m_i} $ ——第$ i $段缆绳质点质量(kg);
$ \dfrac{{\partial {v_i}}}{{\partial {{\dot \theta }_j}}} $ ——第$ i $段缆绳广义速度相对$ \theta $方向的偏速度;
$ \dfrac{{\partial {v_i}}}{{\partial {{\dot \phi }_j}}} $ ——第$ i $段缆绳广义速度相对$ \phi $方向的偏速度。
式(6)即作用在多刚体系统的任一广义坐标$ {\theta _j} $和$ {\phi _j} $上的广义外力与广义惯性力之和为0。
化简Kane动力学方程,有如式(9)所示封闭形式的动力学模型:
$$ {\boldsymbol{M}}{\left[ {\begin{array}{*{20}{c}} {{{\ddot \theta }_1}}&{{{\ddot \phi }_1}}& \cdots &{{{\ddot \theta }_n}}&{{{\ddot \phi }_n}} \end{array}} \right]^{\mathrm{T}}} = {\boldsymbol{B}} $$ (9) 其中,
$$ \left\{ \begin{gathered} {M_{2j - 1,\;2k - 1}} = \sum\limits_{i = j}^n {{m_i}{l_j}{l_k}f} ,f = \left\{ {\begin{array}{*{20}{c}} {{\boldsymbol{R}}{{(j,k)}_{1,1}},k \leqslant i} \\ {0,k > i} \end{array}} \right. \\ {M_{2j - 1,\;2k}} = \sum\limits_{i = j}^n {{m_i}{l_j}{l_k}f} ,f = \left\{ {\begin{array}{*{20}{c}} {\sin ({\theta _k}){\boldsymbol{R}}{{(j,k)}_{1,2}},k \leqslant i} \\ {0,k > i} \end{array}} \right. \\ {M_{2j,\;2k - 1}} = \sum\limits_{i = j}^n {{m_i}{l_j}{l_k}f} ,f = \left\{ {\begin{array}{*{20}{c}} {\sin ({\theta _j}){\boldsymbol{R}}{{(j,k)}_{2,1}},k \leqslant i} \\ {0,k > i} \end{array}} \right. \\ {M_{2j,\;2k}} = \sum\limits_{i = j}^n {{m_i}{l_j}{l_k}f} ,f = \left\{ {\begin{array}{*{20}{c}} {\sin ({\theta _j})\sin ({\theta _k}){\boldsymbol{R}}{{(j,k)}_{2,2}},k \leqslant i} \\ {0,k > i} \end{array}} \right. \\ \end{gathered} \right. $$ (10) 式中:
$ {\boldsymbol{M}} $ ——质量的参数矩阵;
$ {\boldsymbol{B}} $ ——力的参数矩阵;
$ {\boldsymbol{R}} $ ——旋转矩阵组成的算子。
-
由伞梯式陆基AWEs的运行动力学分析可知,伞梯空中设备的运动轨迹控制最终等效于多刚体缆绳模型的节点位移控制。该系统具有显著的时变性和非线性特点,为便于设计控制系统控制律,将式(9)改写如式(11)所示状态模型:
$$ {\boldsymbol{M}}({\boldsymbol{s}}){\boldsymbol{\ddot s}} + {\boldsymbol{C}}({\boldsymbol{s}},{\boldsymbol{\dot s}}) + {\boldsymbol{G}}({\boldsymbol{s}}) = {\boldsymbol{F}} $$ (11) 式中:
$ {\boldsymbol{M}}({\boldsymbol{s}}) $ ——惯性项;
$ {\boldsymbol{C}}({\boldsymbol{s}},{\boldsymbol{\dot s}}) $ ——科里奥利项;
$ {\boldsymbol{G}}({\boldsymbol{s}}) $ ——重力项(N);
$ {\boldsymbol{F}} $ ——外力项(N)。
如上述多刚体绳索系统模型,可将链式多刚体附着质点$i = 1 \ldots n$分为如下3类(如式(12)-式(14)所示):
1)$i = n$。即该质点为氦气球所处的质点,该质点同时受到浮力与空气动力。
2)$i \in {S_{\mathrm{P}}}$。即该质点为平衡/做功伞所处的质点,集合${S_{\mathrm{P}}}$中的质点受到空气动力作用,但不受浮力作用。
3)$i \ne n,i \notin {S_{\mathrm{P}}}$。即该质点非附着平衡/做功伞或氦气球的质点,此类质点不受浮力与空气动力作用。
$$ {{\boldsymbol{F}}}_{{\mathrm{ex}}{{\mathrm{t}}}_{1}}=-\rho Vg+\dfrac{1}{2}\rho {A}_{n}{\Vert {W}_{{\mathrm{e}},n}\Vert }^{2}{C}_{{\mathrm{d}},n}{\vec{{\textit z}}}_{w,n}\text{,}i=n $$ (12) $$ \begin{array}{c}{{\boldsymbol{F}}}_{{\mathrm{ex}}{{\mathrm{t}}}_{2}}=\dfrac{1}{2}\rho {A}_{i}{\Vert {W}_{{\mathrm{e}},i}\Vert }^{2}({C}_{{\mathrm{l}}}({\alpha }_{i}){\vec{x}}_{w,i}+{C}_{{\mathrm{d}}}({\alpha }_{i}){\vec{{\textit z}}}_{w,i})=\\ {A}_{i}\cdot {{\boldsymbol{F}}}_{{\mathrm{basis}},i}\text{,}i\in {S}_{{\mathrm{P}}}\end{array} $$ (13) $$ {{\boldsymbol{F}}}_{{\mathrm{ex}}{{\mathrm{t}}}_{3}}=0\text{,}i\ne n,i\notin P $$ (14) 式中:
$ {\boldsymbol{A}} $ ——所构造表示各个质点有效迎风面积的列向量(m2),其各行元素满足${A_i} = 0,i \ne n,i \notin {S_{\mathrm{P}}}$;
$ {\alpha _i} $ ——第$i$个伞体质点攻角(rad);
$ {{\boldsymbol{F}}_{{\mathrm{ext}}}} $ ——上述3类质点所受外力(N)。
则各伞体质点${m_i},i \in {S_{\mathrm{P}}}$的空气动力均可表示为自身有效迎风面积${A_i}$与一个基向量$ {{\boldsymbol{F}}_{{\mathrm{basis}},i}} $的线性乘积,式(11)外力项转为:
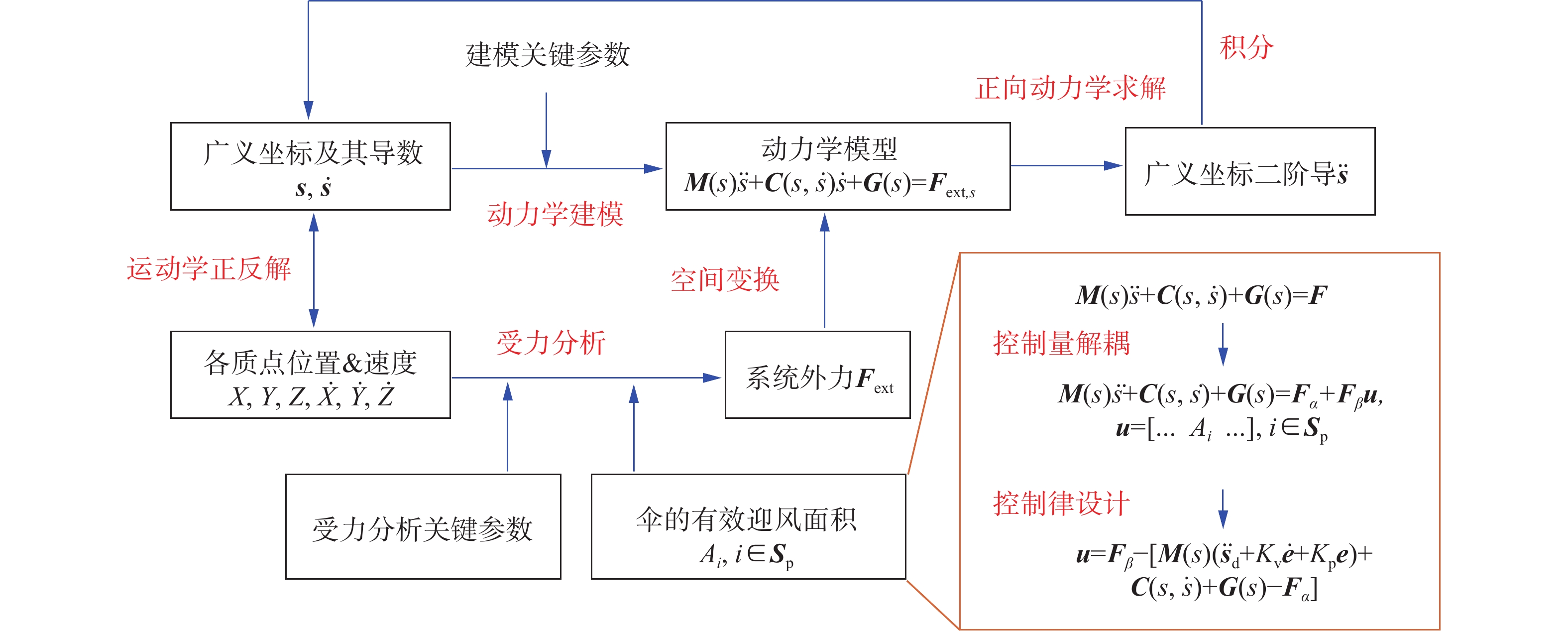
$$ \left\{ \begin{gathered} {\boldsymbol{F}} = {{\boldsymbol{F}}_\alpha } + {{\boldsymbol{F}}_\beta }{\boldsymbol{u}}, \\ {\boldsymbol{u}} = {\left[ {\begin{array}{*{20}{c}} \ldots &{{A_i}}& \ldots \end{array}} \right]^{\mathrm{T}}},i \in {S_{\mathrm{Q}}},{S_{\mathrm{Q}}} \subseteq {S_{\mathrm{P}}} \\ \end{gathered} \right. $$ (15) 式中:
${S_{\mathrm{Q}}}$ ——可自由开合的平衡/做功伞所处的质点的集合;
${\boldsymbol{u}}$ ——${S_{\mathrm{Q}}}$中质点上的伞体有效迎风面积组成的控制向量。
则本节所设计伞梯轨迹跟踪控制策略实现形式为调整各伞所处的质点的位置,并且通过改变伞体连接分缆绳长度以改变伞体有效迎风面积,以姿态控制方法实现伞梯多刚体系统各节点的轨迹跟踪控制,克服风速扰动的对伞梯系统运行的影响。伞梯轨迹跟踪控制策略设计示意图如图5所示。
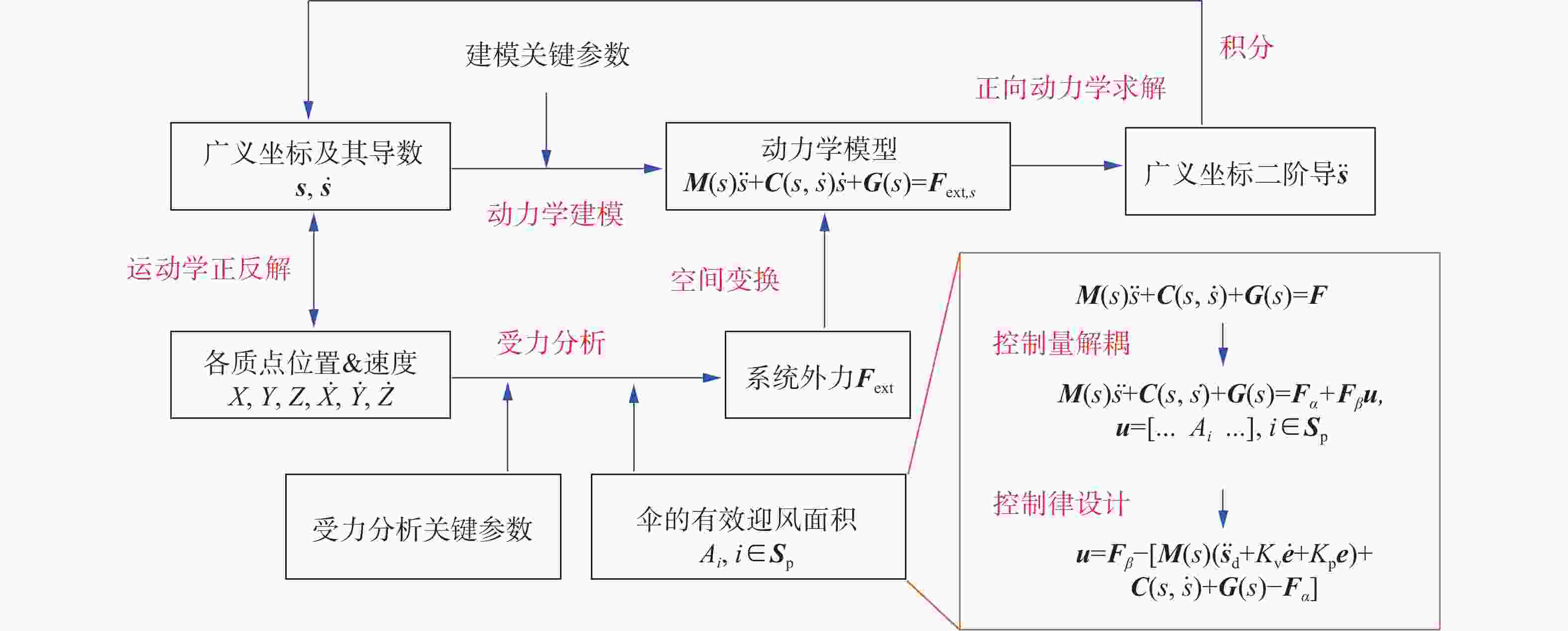
图 5 伞梯轨迹跟踪控制策略设计示意图
Figure 5. Design diagram of kite train trajectory tracking control strategy
如上述伞梯多刚体模型,为其设计用广义坐标描述的期望轨迹$ {{\boldsymbol{s}}_{\mathrm{d}}} $,该期望轨迹表示伞梯从初始状态运动到期望的平衡状态过程。此时定义伞梯的状态误差如式(16)所示:
$$ {\boldsymbol{e}} = {{\boldsymbol{s}}_{\mathrm{d}}} - {\boldsymbol{s}} $$ (16) $$ {\boldsymbol{s}} = {\left[ {\begin{array}{*{20}{c}} {{\theta _1}}&{{\phi _1}}& \ldots &{{\theta _n}}&{{\phi _n}} \end{array}} \right]^{\mathrm{T}}} $$ (17) 式中:
$ {\boldsymbol{e}} $ ——伞梯轨迹状态误差(rad);
$ {\boldsymbol{s}} $ ——广义坐标系下的伞梯运动轨迹(rad)。
则可设计增广比例微分(Proportional Differential,PD)控制律:
$$ {\boldsymbol{u}} = {{\boldsymbol{F}}_{\beta} }^ - \left[ {{\boldsymbol{M}}({\boldsymbol{s}})({{{\boldsymbol{\ddot s}}}_{\mathrm{d}}} + {{\boldsymbol{K}}_{\mathrm{v}}}{\boldsymbol{\dot e}} + {{\boldsymbol{K}}_{\mathrm{P}}}{\boldsymbol{e}}) + {\boldsymbol{C}}({\boldsymbol{s}},{\boldsymbol{\dot s}}) + {\boldsymbol{G}}({\boldsymbol{s}}) - {{\boldsymbol{F}}_{\alpha} }} \right] $$ (18) 伞梯式陆基AWEs位置控制系统各参数设置如表1所示。
表 1 伞梯系统参数
Table 1. Kite train system parameters
参数/单位 控制系统参数取值 描述 ${\rho _{\mathrm{s}}}/({\mathrm{kg}} \cdot {{\mathrm{m}}^{ - 2}})$ 0.5 氦气球和伞的材质面密度 ${r_{\mathrm{b}}}/{\mathrm{m}}$ 10 氦气球半径 $ {{\mathrm{C}}}_{{\mathrm{l}}}/常系数 $ 0 氦气球气动升力系数 $ {{\mathrm{C}}}_{{\mathrm{d}}}/常系数 $ 0.6 氦气球气动阻力系数 ${l_{\mathrm{b}}}/{\mathrm{m}}$ 600 氦气球与地面锚固点距离 ${r_{\mathrm{p}}}/{\mathrm{m}}$ 20 平衡伞最大半径 ${A_{\max }}/{{\mathrm{m}}^2}$ 1 256 平衡伞最大有效迎风面积 ${ m_{\mathrm{b}}}/{\mathrm{kg}} $ 628 平衡伞质量 $\Delta L/{\mathrm{m}}$ 60 平衡伞之间间距 -
对于伞梯式陆基AWEs,伞梯群分散协调与智能协同尤为重要。为实现运行安全控制,针对毗邻的多个伞梯,在保证状态误差的收敛性的同时,应考虑规避伞梯之间的碰撞风险,尤其是高空风场存在时变的纵向扰动时。本节通过设计同步控制律以使伞梯之间达到运动的同步,实现系统在高空风场动态环境中的安全高效运行的控制目标。
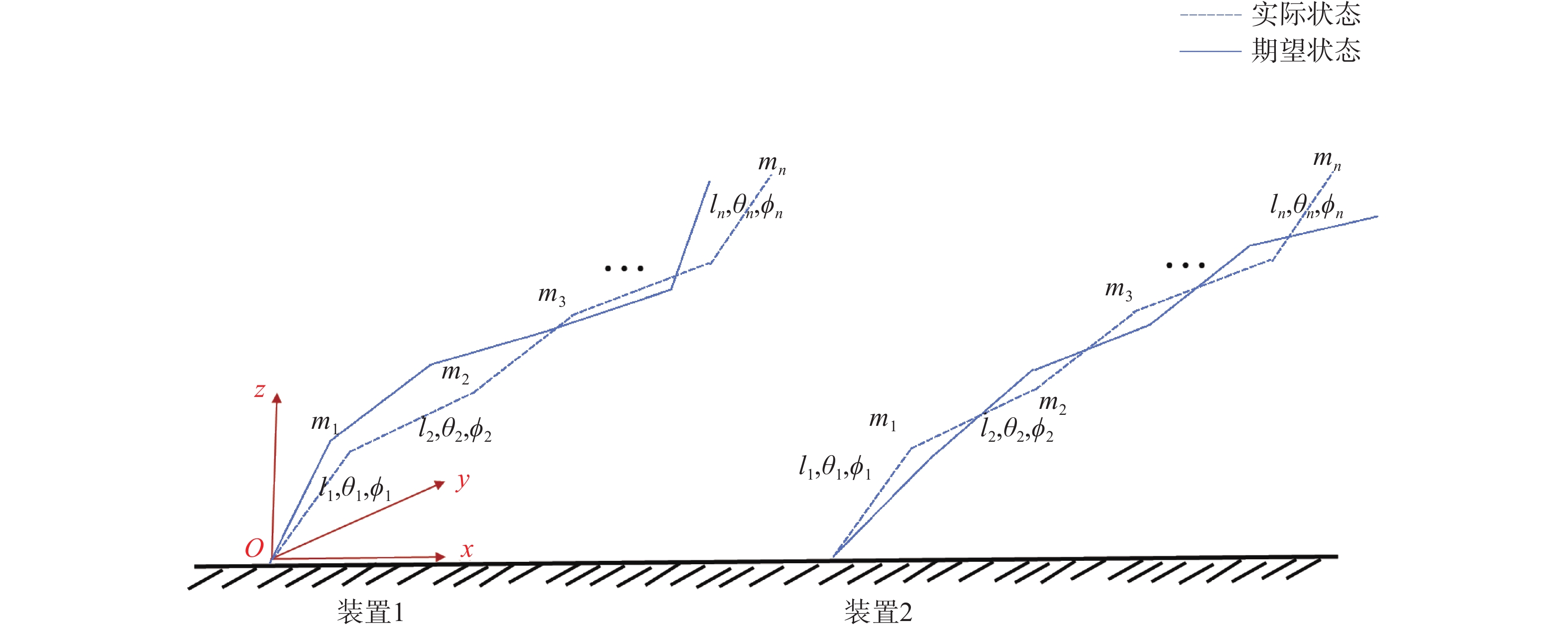
如图6所示,多伞梯系统中的每个毗邻的伞梯分别具有广义坐标$ ({{\boldsymbol{s}}_1} \ldots {{\boldsymbol{s}}_k}) $,期望状态$ ({{\boldsymbol{s}}_{{\mathrm{d}},1}} \ldots {{\boldsymbol{s}}_{{\mathrm{d}},k}}) $以及状态误差$({{\boldsymbol{e}}_1} \ldots {{\boldsymbol{e}}_k})$。记伞梯间混合状态误差如式(19)所示:
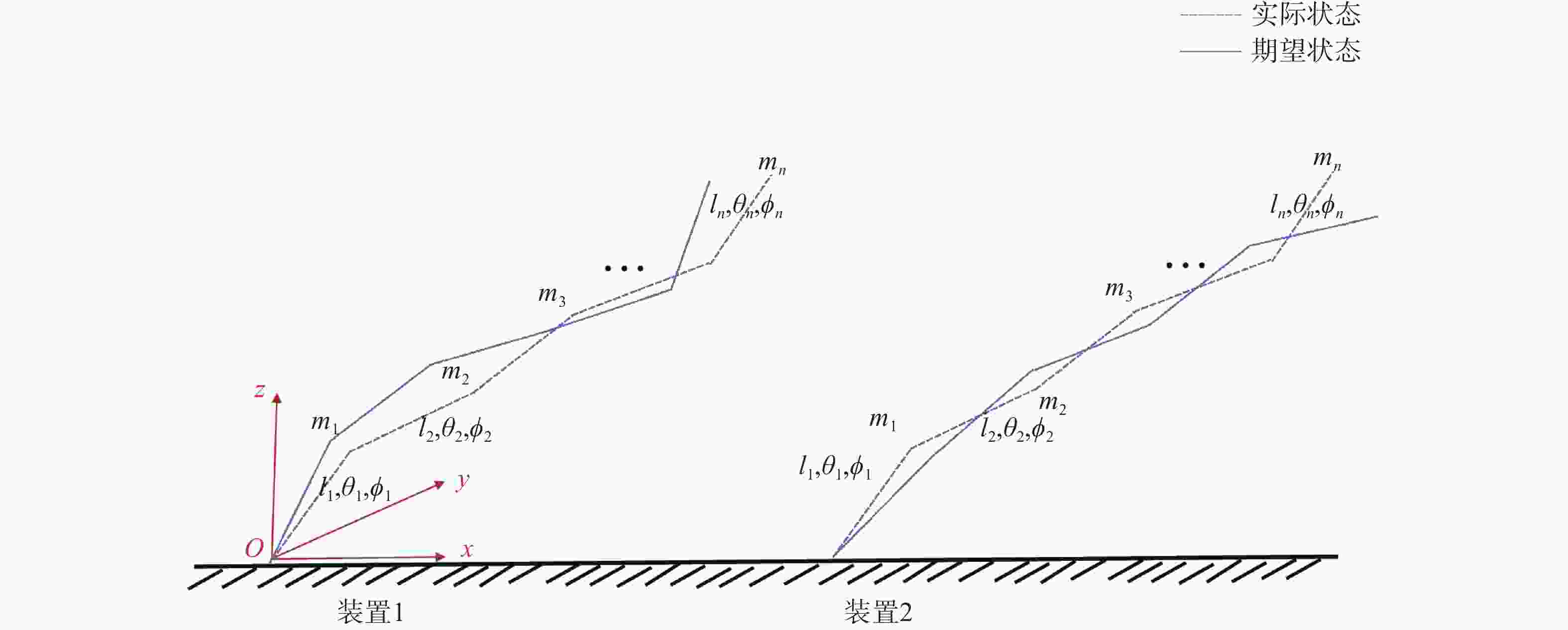
图 6 毗邻伞梯间的位置关系示意图
Figure 6. Schematic diagram of the positional relationship between adjacent kite trains
$$ \left\{ \begin{gathered} {{\boldsymbol{e}}_{c,i}} = {{\boldsymbol{e}}_i} + d\int\limits_0^t {{{\boldsymbol{e}}_i} - {{\boldsymbol{e}}_{i + 1}}} ,i = 1 \ldots k - 1 \\ {{\boldsymbol{e}}_{c,k}} = {{\boldsymbol{e}}_k} + d\int\limits_0^t {{{\boldsymbol{e}}_k} - {{\boldsymbol{e}}_1}} \\ \end{gathered} \right. $$ (19) 式中:
$ d $——比例系数。
装置$ i = 1 \ldots k $的动力学模型如式(20)所示:
$$ {\boldsymbol{M}}({{\boldsymbol{s}}_i}){{\boldsymbol{\ddot s}}_i} + {\boldsymbol{C}}({{\boldsymbol{s}}_i},{{\boldsymbol{\dot s}}_i}) + {\boldsymbol{G}}({{\boldsymbol{s}}_i}) = {{\boldsymbol{F}}_{\alpha ,i}} + {{\boldsymbol{F}}_{\beta ,i}}{{\boldsymbol{u}}_i} $$ (20) 则可设计装置$ i = 1 \ldots k $如式(21)的计算力矩同步控制律:
$$ \left\{ \begin{gathered} {{\boldsymbol{u}}_i} = {{\boldsymbol{F}}_{\beta ,i}}^ - [{\boldsymbol{M}}({{\boldsymbol{s}}_i})({{{\boldsymbol{\ddot s}}}_{{\mathrm{d}},i}} + d({{{\boldsymbol{\dot e}}}_i} - {{{\boldsymbol{\dot e}}}_{i + 1}}) + {{\boldsymbol{K}}_{{\mathrm{v}},i}}{{{\boldsymbol{\dot e}}}_{{\mathrm{c}},i}} + {{\boldsymbol{K}}_{{\mathrm{d}},1}}{{\boldsymbol{e}}_{{\mathrm{c}},i}}) + \\ {\boldsymbol{C}}({{\boldsymbol{s}}_i},{{{\boldsymbol{\dot s}}}_i}) + {\boldsymbol{G}}({{\boldsymbol{s}}_i}) - {{\boldsymbol{F}}_{\alpha ,i}}],i = 1 \ldots k - 1 \\ {{\boldsymbol{u}}_k} = {{\boldsymbol{F}}_{\beta ,k}}^ - [{\boldsymbol{M}}({{\boldsymbol{s}}_k})({{{\boldsymbol{\ddot s}}}_{{\mathrm{d}},k}} + d({{{\boldsymbol{\dot e}}}_k} - {{{\boldsymbol{\dot e}}}_1}) + {{\boldsymbol{K}}_{{\mathrm{v}},k}}{{{\boldsymbol{\dot e}}}_{{\mathrm{c}},k}} + {{\boldsymbol{K}}_{{\mathrm{d}},k}}{{\boldsymbol{e}}_{{\mathrm{c}},k}})+ \\ {\boldsymbol{C}}({{\boldsymbol{s}}_k},{{{\boldsymbol{\dot s}}}_k}) + {\boldsymbol{G}}({{\boldsymbol{s}}_k}) - {{\boldsymbol{F}}_{\alpha ,k}}] \\ \end{gathered} \right. $$ (21) 式中:
$ {{\boldsymbol{F}}_{\beta ,i}}^ - ,i = 1 \ldots k $——矩阵$ {{\boldsymbol{F}}_{\beta ,i}},i = 1 \ldots k $的伪逆,满足$ {{\boldsymbol{F}}_{\beta ,i}} \cdot {{\boldsymbol{F}}_{\beta ,i}}^ - = {\boldsymbol{I}} $;
$ {{\boldsymbol{K}}_{{\mathrm{d}},i}} $ ——所设计增广PD控制律中的比例项系数;
$ {{\boldsymbol{K}}_{{\mathrm{v}},i}} $ ——所设计增广PD控制律中的微分项系数。
则可得各伞梯的闭环方程如式(22)所示:
$$ {{\boldsymbol{\ddot e}}_{{\mathrm{c}},i}} + {{\boldsymbol{K}}_{{\mathrm{v}},1}}{{\boldsymbol{\dot e}}_{{\mathrm{c}},i}} + {{\boldsymbol{K}}_{{\mathrm{d}},1}}{{\boldsymbol{e}}_{{\mathrm{c}},i}} = {\boldsymbol{0}},i = 1 \ldots k $$ (22) 如上,通过设计的增广PD控制律可以得到多伞梯式陆基AWEs的渐近收敛的同步误差。假设为各伞梯规划期望状态$ {{\boldsymbol{s}}_{{\mathrm{d}},i}} = {{\boldsymbol{s}}_{\mathrm{d}}},i = 1 \ldots k $,并且期望状态$ {{\boldsymbol{s}}_{\mathrm{d}}} $关于时间的1,2阶微分$ {{\boldsymbol{\dot s}}_{\mathrm{d}}} $、$ {{\boldsymbol{\ddot s}}_{\mathrm{d}}} $具有合理的变化情况,此时实施上述控制律可以得到系统的渐近收敛的混合误差,在各伞梯向期望轨迹收敛的同时防止多伞梯系统内伞梯之间的碰撞。
-
本文在Matlab/Simulink中基于上述动力学模型与控制算法进行仿真分析,MATLAB作为一款强大的数学计算与可视化软件,广泛应用于科学研究、工程计算及数据分析等领域[16-17]。而Simulink作为其扩展工具箱之一,专注于动态系统和嵌入式系统的模拟与仿真,提供了图形化编程环境,使得用户可以通过拖拽组件构建复杂的系统模型[18-19]。
-
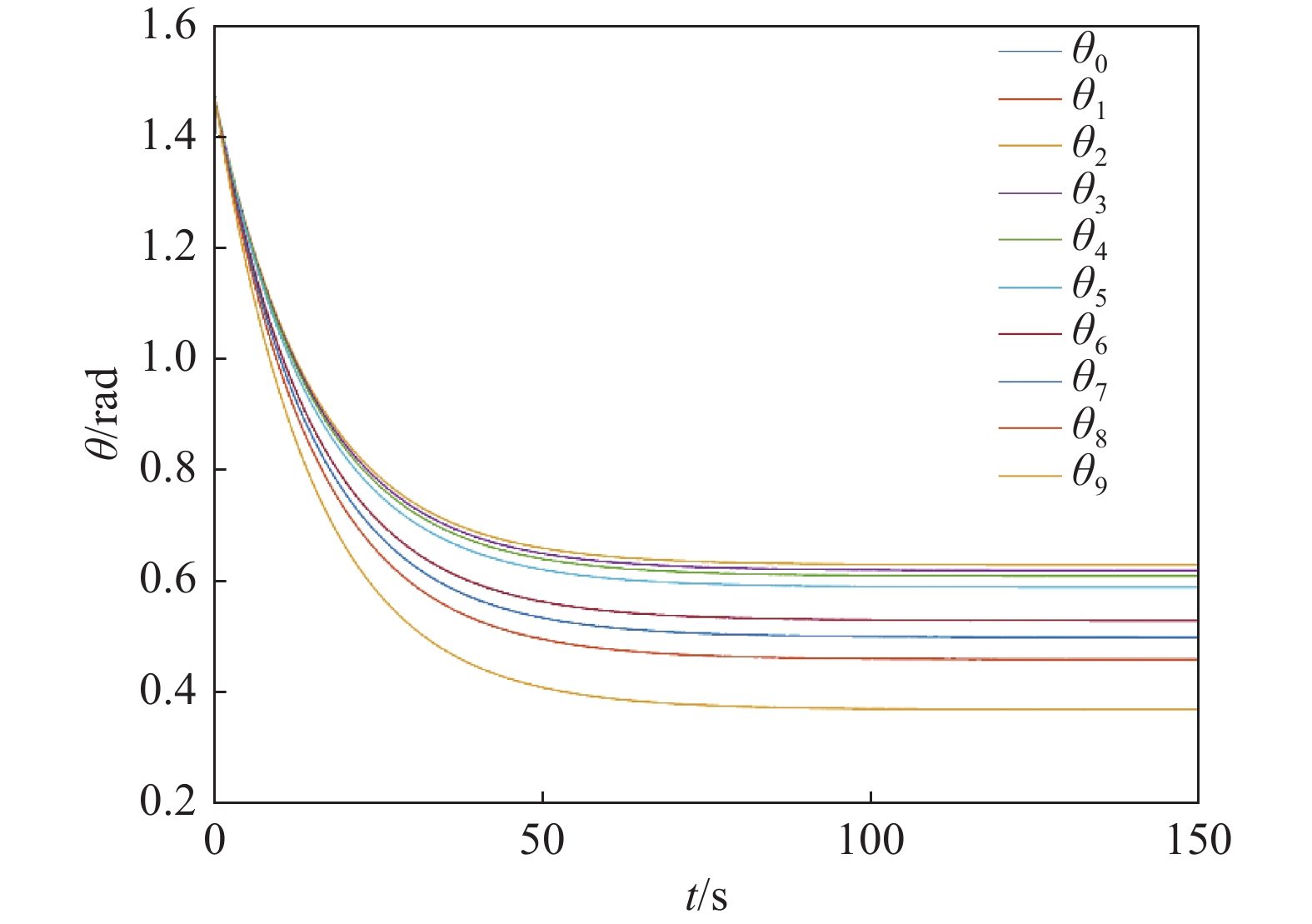
在该实验阶段,假设伞梯式陆基AWEs所处高空风场风向风速为沿地面坐标系x轴方向、大小为10 m/s的来风,并连续施加沿地面坐标系y轴方向、大小为3 m/s的纵向风扰动。依照指数规律设计伞梯各个质点的广义坐标期望值${\theta _{\mathrm{d}}}$随时间的变化情况如式(23)所示:
$$ \left\{ \begin{gathered} {\theta _{{\mathrm{d}},i}} = ({\theta _{{\mathrm{s}},i}} - {\theta _{{\mathrm{e}},i}}){e^{ - \tfrac{t}{{{T}}}}} + {\theta _{{\mathrm{e}},i}} \\ {{\dot \theta }_{{\mathrm{d}},i}} = - \dfrac{1}{{{T}}}({\theta _{{\mathrm{s}},i}} - {\theta _{{\mathrm{e}},i}}){e^{ - \tfrac{t}{{{T}}}}} \\ \end{gathered} \right. $$ (23) 式中:
${\theta _{\mathrm{s}}}$ ——期望轨迹的起始状态(rad);
${\theta _{\mathrm{e}}}$ ——期望轨迹的平衡状态(rad);
$ {{T}} $ ——过渡过程时间常数。
实验参数设置如表2所示。
表 2 跟踪控制实验参数
Table 2. Tracking control experimental parameters
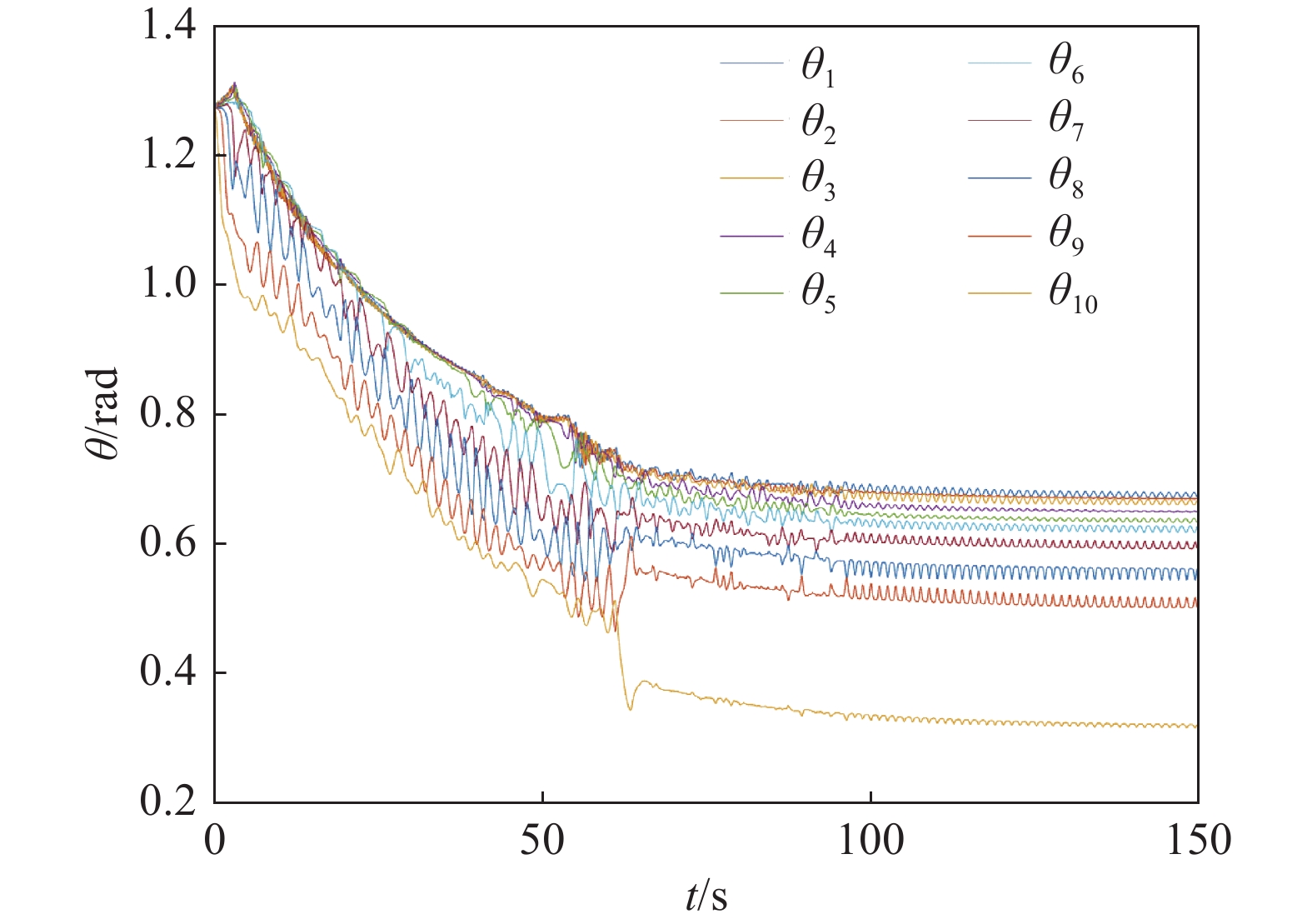
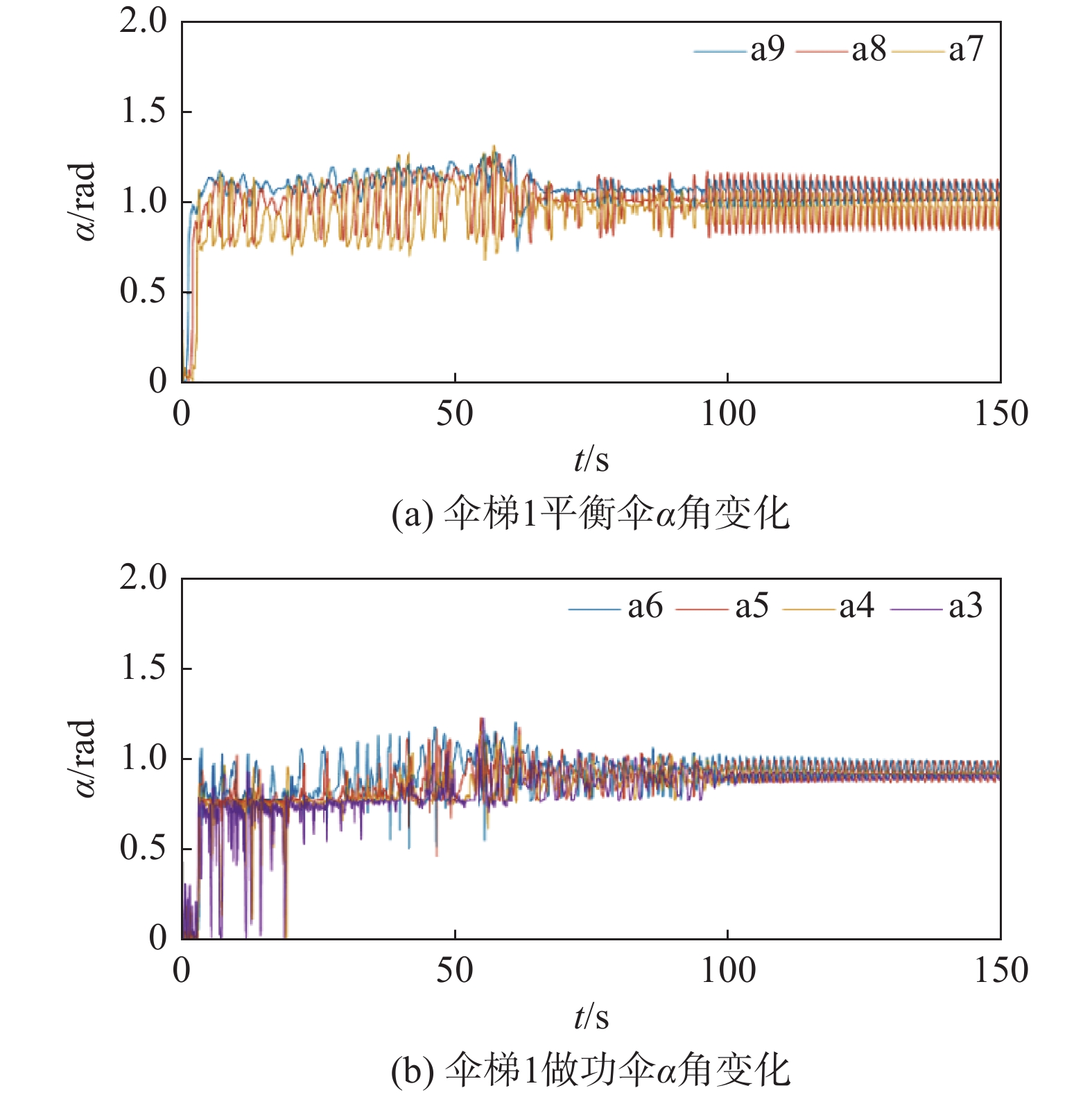
实验参数 实验参数取值 $ {\theta _{{\mathrm{s}},i}} $ $ \dfrac{\text{π} }{2} - 0.1,i = 1 \ldots n $ $ {{\boldsymbol{\theta }}_{\mathrm{e}}} $ $ {\left[ \begin{gathered} 0.63,0.63,0.63,0.62,0.61, \\ 0.59,0.53,0.50,0.46,0.37 \\ \end{gathered} \right]^{\mathrm{T}}} $ $ {{T}} $ 15 $ {{\boldsymbol{K}}_{\mathrm{v}}} $ $ {\mathrm{diag}}(25) $ $ {{\boldsymbol{K}}_{\mathrm{d}}} $ $ {\mathrm{diag}}(50) $ 在伞梯在运动过程中,伞体广义坐标下期望轨迹如图7所示,广义坐标$\theta $随时间的变化如图8所示,与${\theta _{\mathrm{d}}}$的误差随时间的变化如图9所示,各个伞的α角随时间的变化如图10所示。如图9-图10,伞梯受控运行过程的轨迹状态误差与各伞体α角在50 s后均基本趋于稳定,保持在稳定值附近,且伞梯各质点的轨迹状态误差都近似收敛到0附近,实现了纵向扰动下的稳定轨迹跟踪控制。

图 7 所设定伞梯各质点期望轨迹
Figure 7. Expected trajectories of each particle on the set kite train
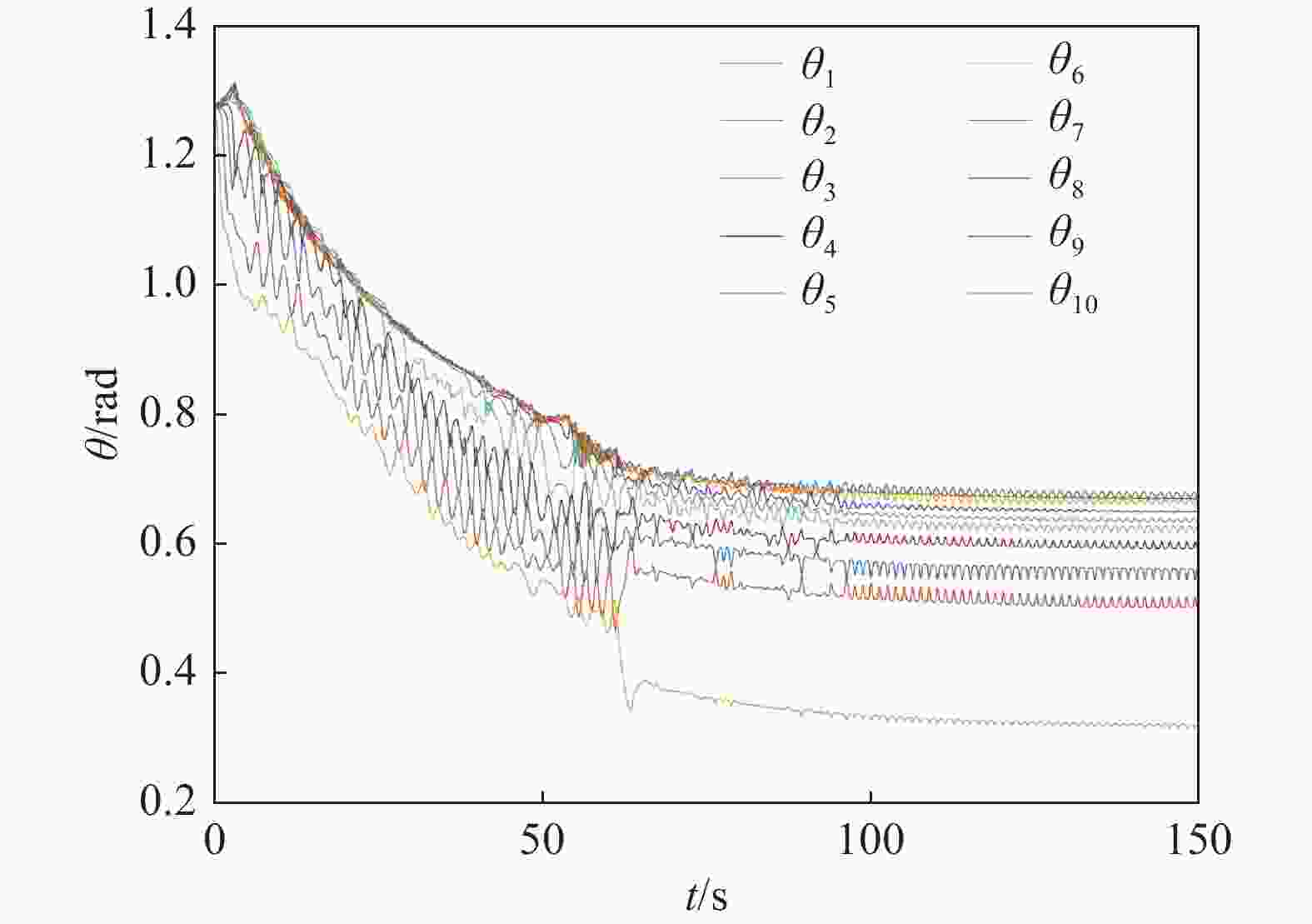
图 8 伞梯各质点实际轨迹
Figure 8. Actual trajectories of each particle on the kite train
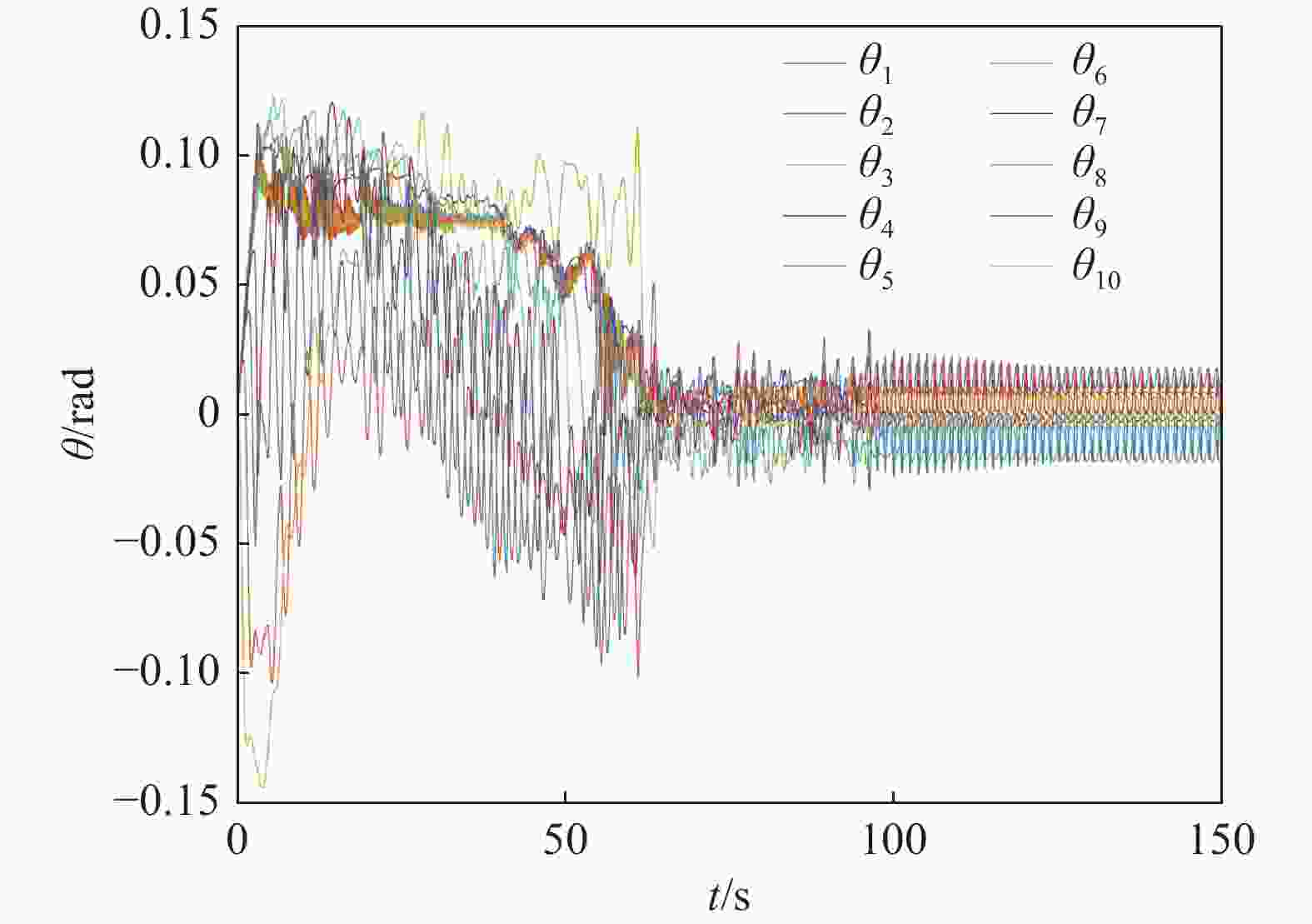
图 9 伞梯实际轨迹与期望轨迹误差示意图
Figure 9. Schematic diagram of the error between the actual trajectory and the expected trajectory of the kite train

图 10 伞梯各伞体α角变化示意图
Figure 10. Schematic diagram of changes in the α angles of each umbrella of the kite train
-
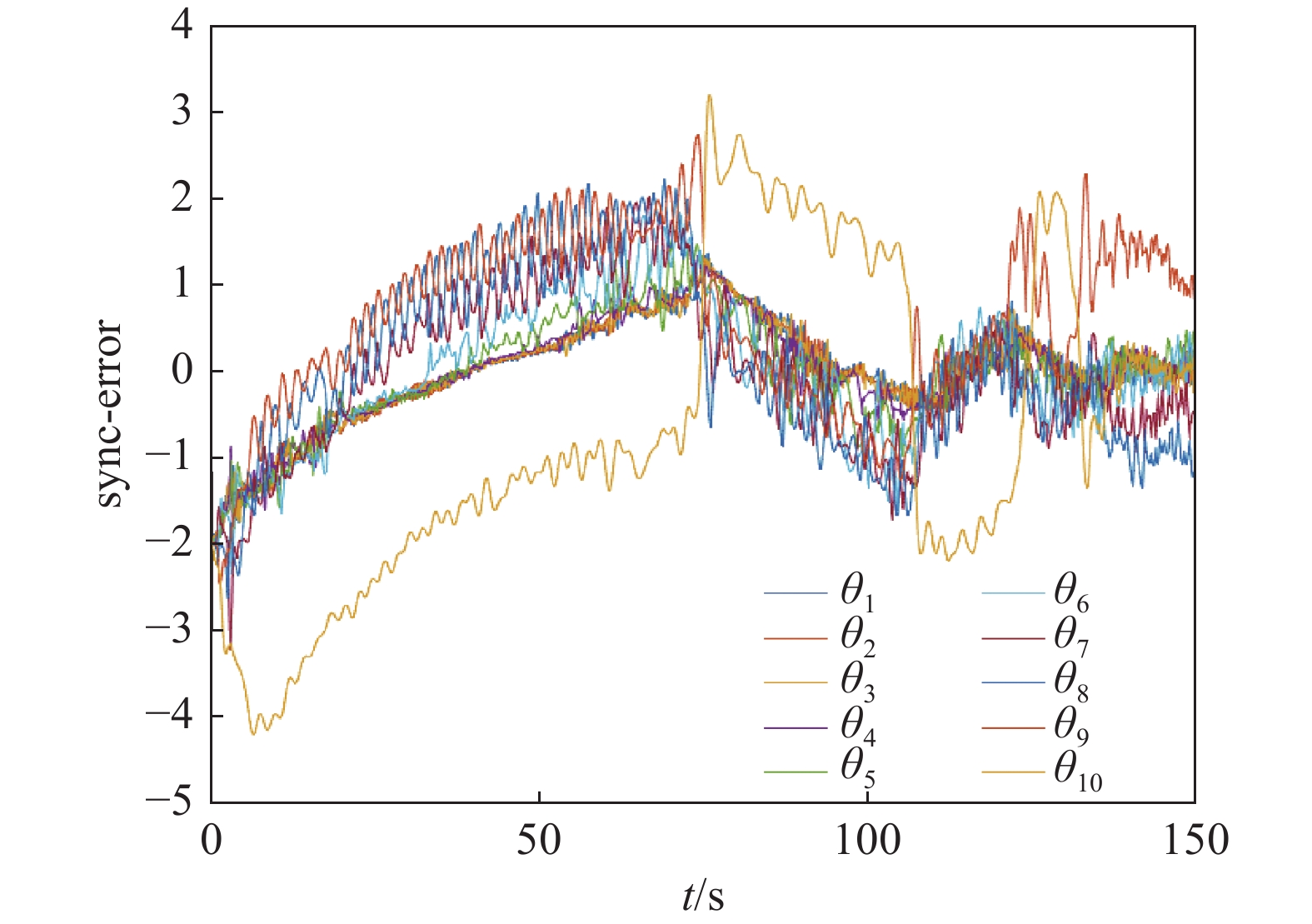
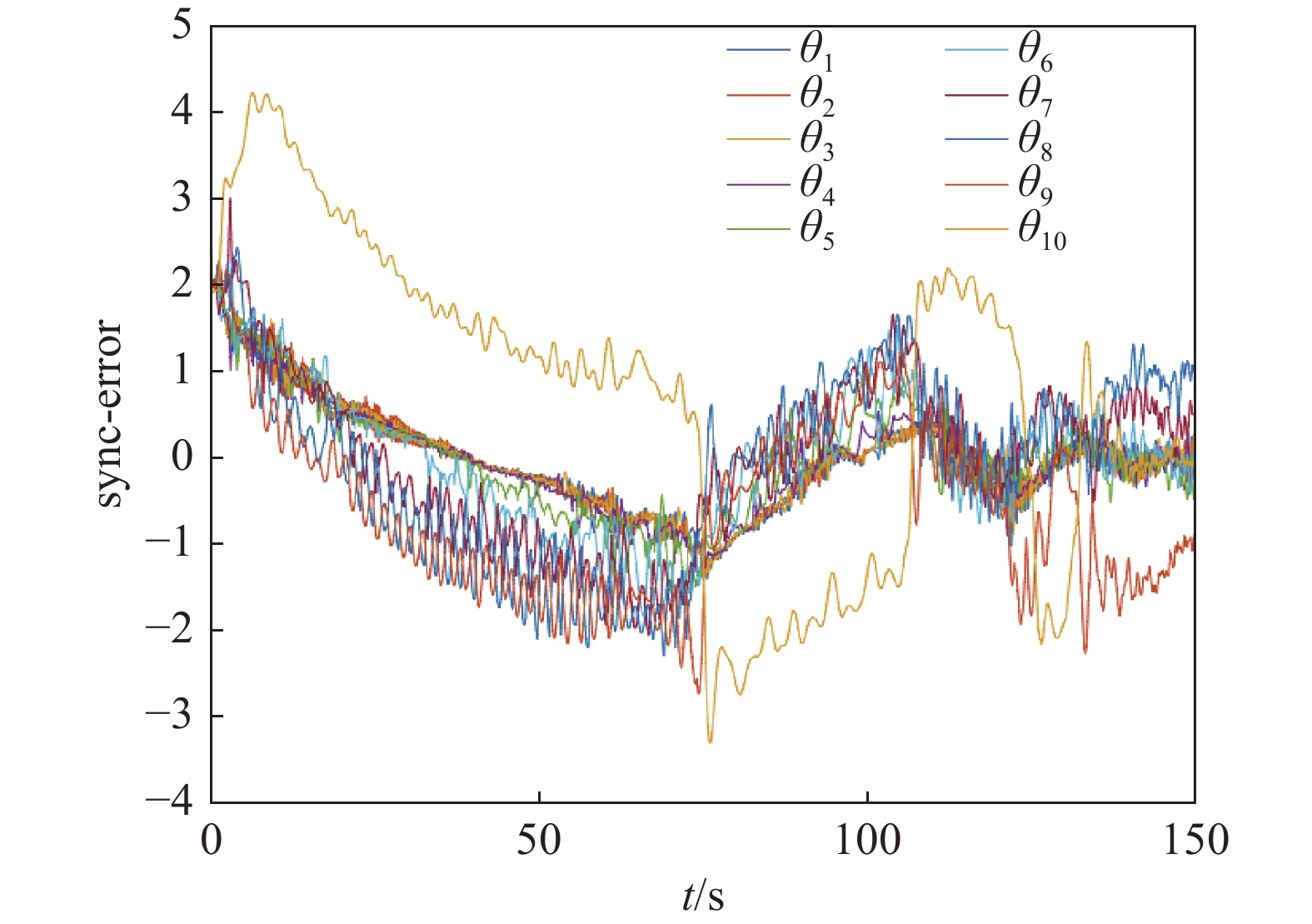
如上述式(19)所示同步控制律,本节进行纵向扰动高空风场的多伞梯同步控制仿真实验,实验参数设置如表3所示,伞梯间的同步误差变化情况如图11-图12所示,在前期运行过程中,两伞梯系统间的同步误差较大,但随着运行控制,多刚体模型各质点的同步误差在150 s后基本稳定。经过一段时间的控制后,两伞梯的形状达到近似平行,符合系统防碰撞控制的安全考虑需求。显然,在所设计的同步控制律控制作用下,伞梯间的状态误差收敛能力相比于单个伞梯而言有所下降。事实上,由于控制量由各个伞的有效迎风面积组成,具有实际物理意义,需要保持严格的有界性[20];此外,伞梯的链式多刚体模型是高度非线性的欠驱动系统,控制量之间高度耦合,不具有全局能控性,在同步控制实验中可能存在不可估计的不能控的状态。虽然多伞梯系统同步控制实验状态误差较于单伞梯有所增大,但是伞梯之间仍然在有限时间内取得了较好的同步性,足见同步控制律的有效性。
表 3 同步控制实验参数
Table 3. Synchronous control experimental parameters
实验参数 实验参数取值 d 10 $ {{\boldsymbol{K}}_{{\mathrm{v}},i}} $ $ {\mathrm{diag}}(80) $ $ {{\boldsymbol{K}}_{{\mathrm{d}},i}} $ $ {\mathrm{diag}}(25) $ 
图 11 伞梯1同步误差变化
Figure 11. Kite train 1 synchronization error change

图 12 伞梯2同步误差变化
Figure 12. Kite train 2 synchronization error change
-
为进一步证明所提出控制策略的有效性,本节的仿真实验中,在沿地面坐标系x轴方向、大小为10 m/s的恒定来风基础上,为风速施加不同频率,不同幅度的正弦扰动,观察施加上述轨迹跟踪控制律的伞梯与同步控制律的多伞梯系统的运动过程,以研究伞梯系统在噪声纵向扰动环境下的稳定性。
在本节跟踪控制仿真实验中,当在上述噪声纵向扰动的高空风场环境下,做功伞所处各质点$ \theta $角的误差大小超过0.1 rad,则认为该伞梯系统不能够通过本文所设计跟踪控制策略以克服高空风速扰动的影响,此时判定伞梯运行是不稳定的。仿真实验进行50 s后,加上不同幅度、不同周期的纵向正弦扰动,伞梯稳定性情况记录如表4所示。
表 4 正弦扰动对受控制单伞梯的稳定性影响
Table 4. The influence of sinusoidal disturbance on the stability of controlled single umbrella ladder
幅度 周期 20 s 10 s 5 s 2 s 5 m/s 稳定 稳定 稳定 稳定 7 m/s 稳定 稳定 稳定 稳定 9 m/s 不稳定 稳定 稳定 稳定 11 m/s 不稳定 稳定 不稳定 不稳定 13 m/s 不稳定 不稳定 不稳定 不稳定 在本节同步控制仿真实验中,设置伞梯缆绳锚固点间隔为200 m。当两个伞梯受到不同的噪声纵向扰动时,其做功伞所处各质点θ角误差大小超过0.1 rad,或伞梯间距小于140 m,则认为该伞梯系统不能够通过本文所设计同步控制策略以克服高空风速扰动的影响,此时判定伞梯运行是不稳定的。仿真实验进行50 s后,加上不同幅度、不同周期的纵向正弦扰动,伞梯稳定性情况记录如表5所示。
表 5 正弦扰动对受同步控制的多伞梯系统的稳定性影响
Table 5. The influence of sinusoidal disturbance on the stability of multi parachute ladder systems under synchronous control
幅度 周期 20 s 10 s 5 s 2 s 2.5 m/s 稳定 稳定 稳定 稳定 5 m/s 不稳定 稳定 稳定 稳定 7 m/s 不稳定 稳定 稳定 稳定 9 m/s 不稳定 稳定 不稳定 稳定 11 m/s 不稳定 不稳定 不稳定 稳定 13 m/s 不稳定 不稳定 不稳定 不稳定 如表4-表5所示,当为高空风场所施加正弦纵向扰动幅度与周期较小时,本文所设计跟踪控制策略与同步控制策略仍保持较好的控制效果,实现伞梯控制系统运行过程的稳定与误差收敛,这证明了本文控制策略的有效性。然而,随着所施加正弦纵向扰动幅度与频率的增长,当到达高幅度高频率变化的极端风场环境,伞梯控制系统稳定性逐渐降低,尤其是多伞梯同步控制策略,对高空风场风速变化更为敏感。因此,在伞梯式陆基AWEs运行过程中,应准确掌握实时风场变化信息,实现在极端运行环境下的紧急停运等操作,以规避风险,确保设备的安全运行。
本文所设计控制策略是基于具有实际物理意义的控制量设计,需要保持严格的有界性,这限制了控制律的灵活性和响应速度。同时,所建立伞梯链式多刚体模型高度非线性且欠驱动,控制量之间高度耦合,导致系统不具有全局能控性,可能存在不可控状态。但是在较小幅度和周期的正弦纵向扰动仿真环境下,跟踪控制和同步控制策略均表现出良好的控制效果,系统稳定性高,足见所设计控制策略有效性。在未来的研究中,有必要对模型进一步优化简化,同时结合对高空风场风速信息的预测,开发具有迭代优化特性的模型预测控制方案,并嵌套设计极端风况下的机组自停自动控制策略,以推动伞梯式陆基AWEs技术的进一步发展。
-
高空风力发电技术是一种创新且潜力巨大的可再生能源解决方案,有望成为未来能源结构的重要组成部分。25 MW级高空风能发电技术与装备研究将推动我国千米级高空风能发电原创技术策源地建设和产业发展。本文以中国能源建设集团参与建设运营的某伞梯式陆基AWEs发电站示范工程为研究对象,开展高空风电系统建模与稳定运行控制方法的试验研究,得到如下结论:
1)基于所建立的伞梯式陆基AWEs多刚体模型,设计了以安全稳定运行控制目标的跟踪控制与同步控制方法,通过调整伞体的有效迎风面积能够实现高空风场变化的纵向扰动下,伞梯的实际运动轨迹与期望轨迹之间的误差收敛,且基于所设计同步控制律,实现了多伞梯间的运行同步,达到防碰撞的安全运行目的,且所设计控制方法具有实际物理意义。
2)在多种噪声纵向扰动的高空风场模拟环境中,若达到系统安全运行的目的,需应准确掌握实时风场变化信息,在高幅度高频率变化的风场环境中系统仅依靠设计的控制律难以保持稳定,这是由于伞梯系统控制量之间的高度耦合,不具有全局能控性导致,需设计额外的紧急回收等控制措施,以保证系统设备安全。
3)未来的高空风电控制系统研究,需聚焦于复杂多变工况及运行环境下系统的稳定运行控制方法,控制量可进一步探究地面电机设备与空中设备耦合关系,不局限于空中伞体姿态控制,开发系统鲁棒控制策略,以实现伞梯式陆基AWEs系统安全、高效、稳定运行,推动高空风力发电技术进一步发展和应用。
计及纵向扰动稳定的高空风电系统建模与稳定运行控制方法
DOI: 10.16516/j.ceec.2024-306
CSTR: 32391.14.j.ceec.2024-306
作者简介:


通讯作者:
Modeling and Stable Operation Control Method for Airborne Wind Energy System Considering Longitudinal Disturbance Stability
-
摘要:
目的 文章旨在探索伞梯式陆基高空风力发电系统(Airborne Wind Energy systems,AWEs)动态建模方法及高空风场变化的纵向扰动时伞梯及伞梯间稳定轨迹跟踪控制方法。 方法 以25 MW级伞梯式陆基AWEs为例,探究伞组组件力学响应特性,构建伞梯系统多刚体绳索动力学模型,在施加纵向扰动的高空风场模拟环境中,基于伞体姿态控制,设计跟踪与同步控制律,实现伞梯轨迹跟踪与运行安全控制。 结果 研究表明:调整伞体的有效迎风面积能够实现高空风场变化的纵向扰动下,伞梯的实际运动轨迹与期望轨迹之间的误差收敛,且基于所设计同步控制律,实现了多伞梯间的运行同步,达到防碰撞的安全运行目的。 结论 可基于伞体姿态控制,设计伞梯式陆基AWEs运行的跟踪与同步控制策略,实现系统在高空风场动态环境中的安全高效运行控制目标。 Abstract:Objective This paper aims to explore dynamic modeling methods for airborne wind energy systems (AWEs) and trajectory tracking control methods for stable trajectories of kite trains and between kite trains when subjected to longitudinal disturbances in high-altitude wind fields. Method Taking a 25 MW-level kite-based AWEs as an example, this study investigated the mechanical response characteristics of kite arrays and constructed a multi-rigid body dynamic model of the kite-based system. In a simulated environment replicating high-altitude wind fields subjected to longitudinal disturbances, the study employed kite attitude control to design synchronous control laws, enabling trajectory tracking and ensuring operational safety of the kite-based system. Result The results demonstrate that adjusting the effective windward area of the kite can mitigate longitudinal disturbances caused by variations in high-altitude wind fields, leading to the convergence of errors between the actual and desired trajectories of the kite-based system. Moreover, based on the synchronous control laws designed, synchronization among multiple kite- based systems has been achieved, thereby ensuring collision-free and safe operation. Conclusion Using kite attitude control as a basis, a synchronous control strategy can be designed for the operation of kite-based AWEs, thereby achieving the objective of safe and efficient operation control in dynamic high-altitude wind environments. -
Key words:
- airborne wind energy systems /
- system modeling /
- attitude control /
- synchronous control /
- AWEs
-
图 4 多刚体模型中相邻质点的位置关系与缆绳的多刚体模型示意图
Fig. 4 The positional relationship between adjacent mass points in the multi-rigid body model and the multi-rigid body model of the cables schematic diagram
图 5 伞梯轨迹跟踪控制策略设计示意图
Fig. 5 Design diagram of kite train trajectory tracking control strategy
图 6 毗邻伞梯间的位置关系示意图
Fig. 6 Schematic diagram of the positional relationship between adjacent kite trains
图 9 伞梯实际轨迹与期望轨迹误差示意图
Fig. 9 Schematic diagram of the error between the actual trajectory and the expected trajectory of the kite train
图 10 伞梯各伞体α角变化示意图
Fig. 10 Schematic diagram of changes in the α angles of each umbrella of the kite train
表 1 伞梯系统参数
Tab. 1. Kite train system parameters
参数/单位 控制系统参数取值 描述 ${\rho _{\mathrm{s}}}/({\mathrm{kg}} \cdot {{\mathrm{m}}^{ - 2}})$ 0.5 氦气球和伞的材质面密度 ${r_{\mathrm{b}}}/{\mathrm{m}}$ 10 氦气球半径 $ {{\mathrm{C}}}_{{\mathrm{l}}}/常系数 $ 0 氦气球气动升力系数 $ {{\mathrm{C}}}_{{\mathrm{d}}}/常系数 $ 0.6 氦气球气动阻力系数 ${l_{\mathrm{b}}}/{\mathrm{m}}$ 600 氦气球与地面锚固点距离 ${r_{\mathrm{p}}}/{\mathrm{m}}$ 20 平衡伞最大半径 ${A_{\max }}/{{\mathrm{m}}^2}$ 1 256 平衡伞最大有效迎风面积 ${ m_{\mathrm{b}}}/{\mathrm{kg}} $ 628 平衡伞质量 $\Delta L/{\mathrm{m}}$ 60 平衡伞之间间距  下载: 导出CSV
下载: 导出CSV
表 2 跟踪控制实验参数
Tab. 2. Tracking control experimental parameters
实验参数 实验参数取值 $ {\theta _{{\mathrm{s}},i}} $ $ \dfrac{\text{π} }{2} - 0.1,i = 1 \ldots n $ $ {{\boldsymbol{\theta }}_{\mathrm{e}}} $ $ {\left[ \begin{gathered} 0.63,0.63,0.63,0.62,0.61, \\ 0.59,0.53,0.50,0.46,0.37 \\ \end{gathered} \right]^{\mathrm{T}}} $ $ {{T}} $ 15 $ {{\boldsymbol{K}}_{\mathrm{v}}} $ $ {\mathrm{diag}}(25) $ $ {{\boldsymbol{K}}_{\mathrm{d}}} $ $ {\mathrm{diag}}(50) $
下载: 导出CSV
表 3 同步控制实验参数
Tab. 3. Synchronous control experimental parameters
实验参数 实验参数取值 d 10 $ {{\boldsymbol{K}}_{{\mathrm{v}},i}} $ $ {\mathrm{diag}}(80) $ $ {{\boldsymbol{K}}_{{\mathrm{d}},i}} $ $ {\mathrm{diag}}(25) $
下载: 导出CSV
表 4 正弦扰动对受控制单伞梯的稳定性影响
Tab. 4. The influence of sinusoidal disturbance on the stability of controlled single umbrella ladder
幅度 周期 20 s 10 s 5 s 2 s 5 m/s 稳定 稳定 稳定 稳定 7 m/s 稳定 稳定 稳定 稳定 9 m/s 不稳定 稳定 稳定 稳定 11 m/s 不稳定 稳定 不稳定 不稳定 13 m/s 不稳定 不稳定 不稳定 不稳定
下载: 导出CSV
表 5 正弦扰动对受同步控制的多伞梯系统的稳定性影响
Tab. 5. The influence of sinusoidal disturbance on the stability of multi parachute ladder systems under synchronous control
幅度 周期 20 s 10 s 5 s 2 s 2.5 m/s 稳定 稳定 稳定 稳定 5 m/s 不稳定 稳定 稳定 稳定 7 m/s 不稳定 稳定 稳定 稳定 9 m/s 不稳定 稳定 不稳定 稳定 11 m/s 不稳定 不稳定 不稳定 稳定 13 m/s 不稳定 不稳定 不稳定 不稳定
下载: 导出CSV
-
[1] 黄玲玲, 石孝华, 符杨, 等. 基于DCGCN模型的海上风电场超短期功率预测 [J]. 电力系统自动化, 2024, 48(15): 64-72. DOI: 10.7500/AEPS20231101006. HUANG L L, SHI X H, FU Y, et al. Ultra-short-term power prediction for offshore wind farms based on dual channel graph convolution network model [J]. Automation of electric power systems, 2024, 48(15): 64-72. DOI: 10.7500/AEPS20231101006. [2] 黄穗, 蔡彦枫, 王俊, 等. 海面风场资料在广东省阳江海上风电场区域的适用性 [J]. 南方能源建设, 2024, 11(6): 111-123. DOI: 10.16516/j.ceec.2024.6.12. HUANG Sui, CAI Yanfeng, WANG Jun, et al. Applicability analysis of sea surface wind field data for Yangjiang offshore wind farm in Guangdong Province [J]. Southern energy construction, 2024, 11(6): 111-123. DOI: 10.16516/j.ceec.2024.6.12. [3] LI Q W, WANG J Z, ZHANG H P. Comparison of the goodness-of-fit of intelligent-optimized wind speed distributions and calculation in high-altitude wind-energy potential assessment [J]. Energy conversion and management, 2021, 247: 114737. DOI: 10.1016/j.enconman.2021.114737. [4] 姜阳, 陆超, 袁志昌, 等. 高空风力发电系统能量捕获及变换技术: 现状与展望 [J/OL]. (2024-08-29) [2024-09-24]. http://kns.cnki.net/kcms/detail/11.2107.TM.20240829.1325.012.html. JIANG Y, LU C, YUAN Z C, et al. Energy capture and conversion technology of high altitude wind power generation systems: current situation and prospect [J/OL]. (2024-08-29) [2024-09-24]. http://kns.cnki.net/kcms/detail/11.2107.TM.20240829.1325.012.html. [5] CHERUBINI A, PAPINI A, VERTECHY R, et al. Airborne wind energy systems: a review of the technologies [J]. Renewable and sustainable energy reviews, 2015, 51: 1461-1476. DOI: 10.1016/j.rser.2015.07.053. [6] VERMILLION C, COBB M, FAGIANO L, et al. Electricity in the air: insights from two decades of advanced control research and experimental flight testing of airborne wind energy systems [J]. Annual reviews in control, 2021, 52: 330-357. DOI: 10.1016/j.arcontrol.2021.03.002. [7] 韩爽, 刘杉. 高空风力发电关键技术、现状及发展趋势 [J]. 分布式能源, 2024, 9(1): 1-9. DOI: 10.16513/j.2096-2185.DE.2409101. HAN S, LIU S. Key technologies, current status and development trends of high-altitude wind power generation [J]. Distributed energy, 2024, 9(1): 1-9. DOI: 10.16513/j.2096-2185.DE.2409101. [8] FAGIANO L, QUACK M, BAUER F, et al. Autonomous airborne wind energy systems: accomplishments and challenges [J]. Annual review of control, robotics, and autonomous systems, 2022, 5: 603-631. DOI: 10.1146/annurev-control-042820-124658. [9] 蔡彦枫, 李晓宇. 面向空中风力发电系统的高空风场观测 [J]. 南方能源建设, 2024, 11(1): 1-9. DOI: 10.16516/j.ceec.2024.1.01. CAI Y F, LI X Y. High-altitude wind field observation of airborne wind energy system [J]. Southern energy construction, 2024, 11(1): 1-9. DOI: 10.16516/j.ceec.2024.1.01. [10] 邵垒, 毛虹霖, 邢胜, 等. 高空风力发电发展现状及关键技术研究综述 [J]. 新能源进展, 2020, 8(6): 477-485. DOI: 10.3969/j.issn.2095-560X.2020.06.005. SHAO L, MAO H L, XING S, et al. Review on development status and key technology of airborne wind energy system [J]. Advances in new and renewable energy, 2020, 8(6): 477-485. DOI: 10.3969/j.issn.2095-560X.2020.06.005. [11] 周林, 施伟, 张松浩, 等. 破碎波作用下单桩式海上风机水动力学数值分析 [J]. 南方能源建设, 2020, 7(3): 70-80. DOI: 10.16516/j.gedi.issn2095-8676.2020.03.009. ZHOU L, SHI W, ZHANG S H, et al. Numerical analysis of hydrodynamic characteristics of monopile-type OWT under breaking wave [J]. Southern energy construction, 2020, 7(3): 70-80. DOI: 10.16516/j.gedi.issn2095-8676.2020.03.009. [12] KANE T R, LEVINSON D A. The use of Kane's dynamical equations in robotics [J]. The international journal of robotics research, 1983, 2(3): 3-21. DOI: 10.1177/027836498300200301. [13] DONOHUE B, BEKNALKAR S, BRYANT M, et al. A dynamic model for underwater propulsion of an amphibious rover developed from Kane's method [C]// Anon. ASME International Mechanical Engineering Congress and Exposition, New Orleans, USA, October 29-November 2, 2023. New Orleans: American Society of Mechanical Engineers, 2023: V006T07A012. DOI: 10.1115/IMECE2023-113559. [14] BANERJEE A. Flexible multibody dynamics: efficient formulations with applications [M]. Boca Raton: CRC Press, 2022. DOI: 10.1201/9781003231523. [15] 商德勇, 黄欣怡, 黄云山, 等. 基于Kane方程的Delta并联机器人刚柔耦合动力学研究 [J]. 机械工程学报, 2024, 60(7): 124-133. DOI: 10.3901/JME.2024.07.124. SHANG D Y, HUANG X Y, HUANG Y S, et al. Research on rigid-flexible coupling dynamics of Delta parallel robot based on Kane equation [J]. Journal of mechanical engineering, 2024, 60(7): 124-133. DOI: 10.3901/JME.2024.07.124. [16] SOBIE E A. An introduction to MATLAB [J]. Science signaling, 2011, 4(191): tr7. DOI: 10.1126/scisignal.2001984. [17] ATTAWAY S. MATLAB: a practical introduction to programming and problem solving (6th ed. ) [M]. Waltham: Butterworth-Heinemann, 2022. [18] KARRIS S T. Introduction to Simulink with engineering applications [M]. Orchard Publications, 2006. [19] HORRI N, PIETRASZKO M. A tutorial and review on flight control co-simulation using Matlab/Simulink and flight simulators [J]. Automation, 2022, 3(3): 486-510. DOI: 10.3390/automation3030025. [20] LIU K L, GAO Y Z, ZHU C, et al. Electrochemical modeling and parameterization towards control-oriented management of lithium-ion batteries [J]. Control engineering practice, 2022, 124: 105176. DOI: 10.1016/j.conengprac.2022.105176. -


计量
- 文章访问数: 3091
- HTML全文浏览量: 1409
- PDF下载量: 63
- 被引次数: 0
