











-
近年来,伴随着全球人口的不断增长和经济社会的快速发展,能源消耗量急剧增加,不可再生资源日益枯竭,其所带来的温室效应与环境污染问题日趋严重,此消彼长之下,能源与环境问题岌岌可危,成为了制约社会可持续发展的重要问题。因此,目前世界各国都在致力于新能源的开发与利用。其中,太阳能以其储量大,分布广,清洁安全等独特优势成为了替代传统化石能源的理想选择。
目前,常见提高太阳能利用效率的方法主要有提高太阳能电池组件的光电转化效率和提高单位面积光伏组件的辐照接收效率两种方法。第一种方法由于受到材料[1]、技术和成本的限制,不适用于商业大面积应用,目前已经达到了技术瓶颈。而针对第二种方法,众多学者已经研究并提出了多种太阳视日运动轨迹算法。
文献[2]研究结果表明Cooper[3]、Spencer[4]、Stine[5]、Bourges等[6]传统近似算法都可以良好地对太阳光线进行跟踪,而Spencer算法在2018年计算出的太阳高度角和方位角误差最小,跟踪效果最好,因此本文借助了MATLAB对这几种传统算法进行仿真分析,仿真结果表明:跟踪误差最小的传统视日运动轨迹算法其精度也存在10的−1级别上的误差,有鉴于此,本文提出一种8阶的Fourier拟合视日运动轨迹算法,通过对比其计算误差,得出Fourier拟合算法较传统算法拥有高一个数量级的跟踪精度,跟踪效果更好。
本文以该算法为跟踪理论依据,结合了加速度传感器,无线数据通信,电机驱动等装置研究设计了一种基于Fourier拟合的光伏跟踪器系统。以三维上的角度动态测量的方式将跟踪支架与视日运动轨迹算法等控制系统相结合,能够精准追踪太阳实时运行轨迹,增加光伏组件的太阳辐照接收量,大幅提升发电效率的系统装置。
系统整体设计采用嵌入式的开发思路,通过6轴加速度传感器,在只考虑重力影响的情况下,利用重力矢量在其双轴上的投影即可获取光伏组件倾斜度值,并在输出信号中使用消除其高频部分的方法,来对外力干扰进行滤波。再对太阳光线与支架的几何关系建立三维光学模型,结合二者之间的角度关系即可实现单/双轴跟踪。
在常规跟踪模式下,当晨昏时刻太阳高度角比较低的时刻,前排支架势必会对后排支架产生阴影遮挡问题,被遮挡部分的组件太阳辐射值降低,输出功率减小,其串联电阻的电流由于木桶效应,整组支架的输出电流则会减小为该遮挡组件的输出电流,同时该组件还会以耗散器件的形式以发热的方式将未受到遮挡的太阳能电池板所产生的能量消耗掉,从而会对组件产生不可逆转的损害。因此为解决该问题,系统内部集合了逆跟踪算法[7],计算出了常规跟踪和逆跟踪模式的临界角度,当超出该角度即开始进入反向跟踪,避免了晨昏时刻光伏阵列之间的阴影遮挡问题,同时在解决了阴影遮挡问题后,即可适当缩小两排支架之间的距离,通过仿真计算可节省约24.3%的土地资源。
同时考虑到在平单轴系统中,为提升光伏电站的发电总量,需要在单根支架上装载更多的光伏组件,因此本文提出了一种两台或以上电机级联[8]同步驱动支架的控制策略,可实现多台电机驱动单轴上更多的光伏组件,大幅提高电站的发电量。
-
视日运动轨迹算法即根据太阳光线的运动规律,来驱动光伏组件转动至与光线垂直的角度来达到最大辐照接收位置。在地平坐标系中,太阳在天空中的位置可由太阳高度角与方位角来确定,其计算方法如式(1)、式(2)所示:
$$ \alpha {\text{ = }}{\sin ^{ - 1}}(\sin \phi \sin \delta + \cos \phi \cos \delta \cos \omega ) $$ (1) $$ \beta = {\cos ^{ - 1}}\left( {\frac{{\sin \alpha \sin \phi - \sin \delta }}{{\cos \alpha \cos \phi }}} \right) $$ (2) 式中:
$ \alpha $ ——太阳高度角(°);
$ \phi $ ——地理纬度(°);
$ \delta $ ——太阳赤纬角(°);
$ \omega $ ——太阳时角(°);
$\beta $ ——太阳方位角(°)。
-
太阳赤纬角是地球赤道面与太阳光线照射方向的夹角,是由于地球自转轴倾斜,且随着地球围绕太阳公转而产生季节性变化,赤纬角以年为周期,在−23°26′到23°26′之间变化。传统赤纬角近似算法[9]有以下几种。
1)Cooper赤纬角算法:
$$ \delta = 23.45 \times \sin \frac{{2{\text{π }}(284 + n)}}{{365}} $$ (3) 式中:
$n$——当前日期距离1月1日过去的日数(d)。
2)Spencer赤纬角算法:
$$ \begin{split} &\delta = (0.070\;257\sin \theta - 0.399\;912\cos \theta + \\& 0.000\;907\sin (2\theta {\text{)}} - 0.006\;758\cos (2\theta ) + \\& 0.001\;48\sin (3\theta ) - 0.002\;679\cos (3\theta ) + \\& 0.006\;918)\times \dfrac{{180}}{{\text{π }}} \end{split} $$ (4) $$ \theta = \frac{{2{\text{π }}(n - 1)}}{{365}} $$ (5) 3)Stine赤纬角算法:
$$ \delta = {\sin ^{ - 1}}\left[ {0.397\;95\cos \frac{{2{\text{π }}(n - 173)}}{{365.242}}} \right] \times \frac{{180}}{{\text{π }}} $$ (6) 4)Bourges赤纬角算法:
$$ \begin{split} &\delta = 0.372\;3 + 23.256\;7\sin \theta - 0.758\;0\cos \theta+ \\& 0.114\;9\sin (2\theta ) + 0.365\;6\cos (2\theta )- \\& 0.171\;2\sin (3\theta ) + 0.020\;1\cos (3\theta ) \end{split} $$ (7) $$ \theta = \frac{{2{\text{π }}(n - 1 - {n_0})}}{{365.242\;2}} $$ (8) $$ \begin{split} &{n_0} = 0.242\;2 \times (y - 196\;9) - {{\rm{INT}}} [0.25 \times \\& (y - 196\;9)] + 78.801 \end{split} $$ (9) 式中:
$ y $ ——所求日期的年份(年);
${{\rm{INT}}}$ ——向下取整。
日梭万年历[10]是世界上第一款采用现代高精度天文历算法制作的多功能万年历,精度高、结果可靠。与中国科学院紫金山天文台编写的中国天文年历及国际上著名的天体位置计算软件SkyMap Pro相比,各种时间信息的最大误差小于一分钟,是专门为国家授时中心制作的万年历。以该万年历力学时0时的赤纬角作为标准值,对比分析4种算法与标准值的误差情况如图1所示。

图 1 传统太阳赤纬角算法对比
Figure 1. Comparison of traditional solar declination calculation
从图1可以分析得出在4种传统近似算法中,Cooper算法最大正向误差在0.25°左右,负向误差最大在−1.11°左右,Stine算法最大正向误差在0.24°左右,最大负向误差在−1.07°左右,两者误差都较大。Spencer算法次之,误差在±0.53°左右,Bourges在传统赤纬角近似算法表现较好,误差在±0.35°左右。
-
太阳时角是太阳光照射到地面的一点和地心的连线与当地正午时地、日中心连线分别在赤道平面上的投影之间的夹角。其计算方法如式(10)所示:
$$ \omega = 15 \times ({T_{\rm{S}}} - 12) $$ (10) 式中:
$T_{\rm{S}}$——真太阳时(h)。
真太阳时也称之为视太阳时,是根据太阳相对地球所处位置所确定的时间,如太阳处在头顶最高时为正午12:00,在中国境内,通常以平太阳时(北京时间)作为时间标准。真太阳时与平太阳时之间的关系为:
$$ {T_{\rm{S}}} = {T_{\rm{M}}} \pm 4 \times (120 - \varphi ) + \Delta T $$ (11) 式中:
$T_{\rm{M}}$ ——平太阳时(h);
$ \varphi $ ——地理经度(°),西经“$ \pm $”取正数,东经“$ \pm $”取负数;
$ \Delta T $ ——时差(min)。
时差计算方法主要有以下几种:
1)Spencer时差算法:
$$ \begin{split} &\Delta T = (0.001\;868\cos \theta - 0.032\;077\sin \theta- \\& 0.014\;615\cos (2\theta ) - 0.040\;89\sin (2\theta ) + \\& 0.000\;075) * 229.18 \end{split} $$ (12) $$ \theta = \frac{{2{\text{π }}(n - 1)}}{{365}} $$ (13) 2)Stine时差算法:
$$ \begin{split} &\Delta T = 0.258\cos \theta - 7.416\sin \theta - \\& 3.648\cos (2\theta ) - 9.228\sin (2\theta ) \end{split} $$ (14) $$ \theta = \frac{{2{\text{π }}(n - 1)}}{{365.242}} $$ (15) 3)Whillier时差算法:
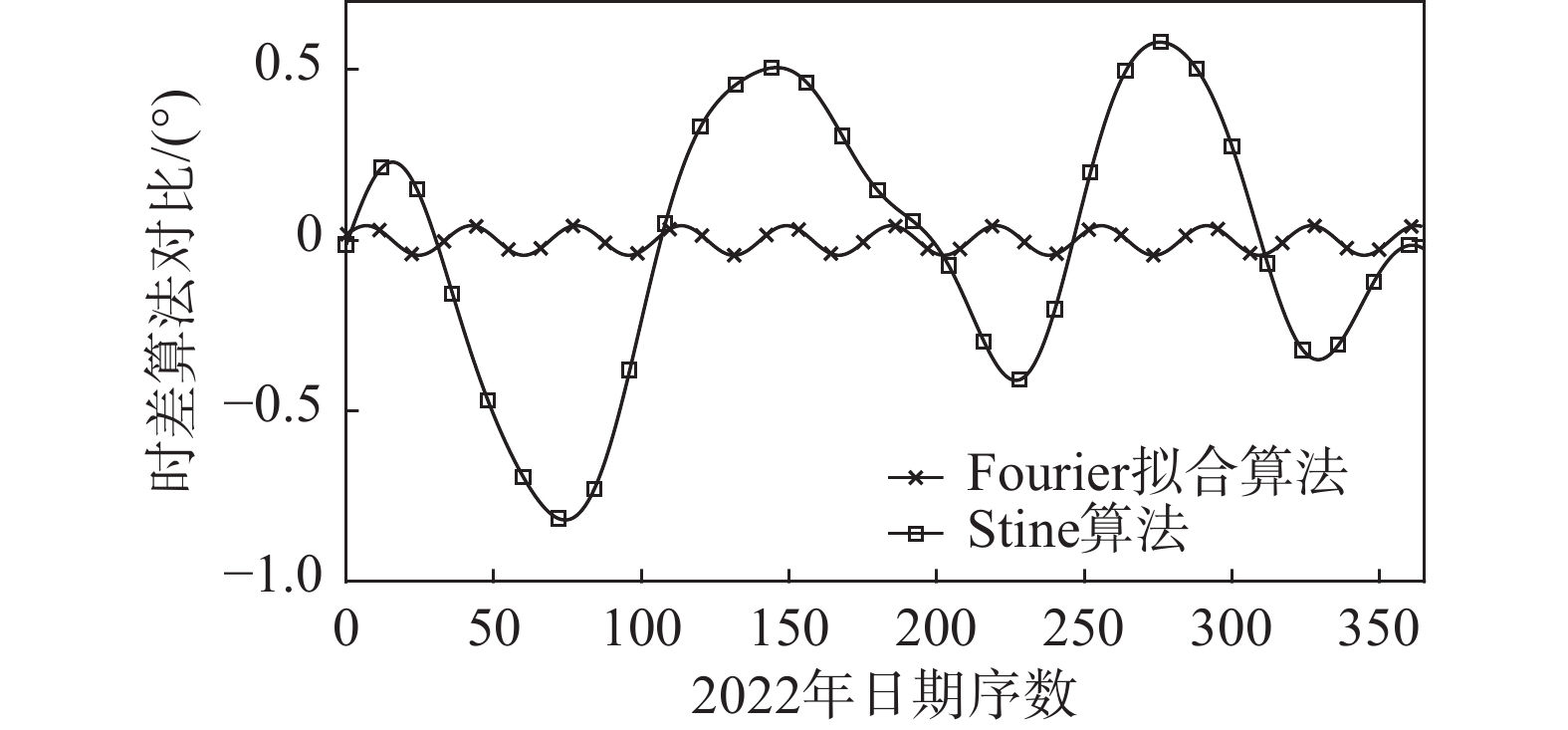
$$ \Delta T = 9.87\sin (2\theta ) - 7.53\cos \theta - 1.5\sin \theta $$ (16) $$ \theta = \frac{{2{\text{π }}(n - 81)}}{{364}} $$ (17) 通过以上3种算法计算出的太阳时角与日梭万年历中的高精度时角数据进行对比,得出其误差情况如图2所示。由图可以对比得出Stine时差算法相较于日梭万年历所记录的标准值的均方根误差最小,为0.164 8 min,但最大负向误差依旧达到−0.8 min左右,因此,可以得出传统的太阳视日运动轨迹算法虽然可以完成太阳高度角和方位角的跟踪,但是依旧存在些许误差,达不到太阳辐射接收的最优状态[10]。

图 2 传统时差算法对比
Figure 2. Comparison of traditional time difference calculation
-
通过仿真分析,传统赤纬角,时差算法与采用高精度天文历算法的日梭万年历相比显然依旧存在较大误差。同时,上述所有方法,对于不同年份的变化采用的是相同的系数变化,并未考虑闰年与平年存在差异和不同的影响,因此,采用传统算法将无法达到太阳辐照的最大利用率。
通过对传统赤纬角算法的分析研究可以得出,太阳赤纬角在±23°26′之间进行回归运行,而以上4种传统赤纬角算法都采用了正弦函数拟合的思想对太阳赤纬的变化进行表达,Cooper算法较为简单,采用一阶正弦函数在23.45的系数上下浮动;Stine算法与Cooper类似,只是在回归年的长度上并没有取365,而是取其实际长度365.242,因此,二者在图1中的误差曲线极为相似;Spencer算法则是从1阶的基础上升到了3阶正弦和函数表达;最后误差最小的Bourges算法,计算公式不仅达到3阶,还在回归年的长度上精确到了小数点后4位,体现了年际变化,同时严格定义1969年的春分日作为标准年,因为此日太阳赤纬角为0°。
传统的时差算法大同小异,3种时差算法都是2阶的正弦和函数,因此,在图2的时差误差对比中,三者曲线走向趋势非常相似。
有鉴于此,本文结合高精度天文历所记录的赤纬角,时角为基础,针对不同年份变化,采用平均数法,提出一种基于Fourier拟合的视日运动轨迹追踪算法。Fourier原理表明:任何连续测量的时序或信号,都可以表示为不同频率的正弦波信号的无限叠加。其计算公式为:
$$ y = {a_0} + \sum\limits_{k = 1}^n {{a_k}\cos 2{\text{π}} kx + {b_k}} \sin 2{\text{π}} kx $$ (18) 式中:
$ {a_0} $ ——直流分量;
$ k $ ——拟合阶数;
$ x $ ——积日序数,如1月6日,$ x = 6 $。
通常情况下拟合阶数越高,拟合曲线就越接近实际值,但过高的拟合阶数也会使得系统开发过程中程序的计算量增大,降低程序运行效率,同时鉴于系统加速度计为16位寄存器,最低分辨率可达到小数点后3位,过高的拟合阶数会使得目标角度超出传感器测量范围,失去其意义。因此通过综合考虑这里拟合阶数只取到8。以2022年扬州地区为例,拟合出赤纬角和时差标准曲线如图3、图4所示。

图 3 Fourier拟合赤纬角曲线
Figure 3. Fourier fitting declination angle curve

图 4 Fourier拟合时差曲线
Figure 4. Fourier fitting time difference curve
通过分析该标准曲线,结合Fourier拟合公式,借助MATLAB进行辅助计算,最终得到Fourier拟合的赤纬角函数和时差函数系数如表1所示。
表 1 Fourier拟合系数
Table 1. Fourier fitting coefficient
拟合项 赤纬角拟合系数 时差拟合系数 $ k $ 0.017 16 0.013 42 $ {a}_{0} $ 0.313 1 0.407 6 $ {a}_{1} $ −22.66 −3.772 $ {a}_{2} $ −0.327 6 −2.417 $ {a}_{3} $ −0.199 6 4.847 $ {a}_{4} $ −0.002 303 −0.428 4 $ {a}_{5} $ 0.029 45 −1.123 $ {a}_{6} $ 0.010 11 −0.462 1 $ {a}_{7} $ −0.006 882 −0.100 8 $ {a}_{8} $ −0.005 506 0.059 25 $ {b}_{1} $ 4.298 −6.012 $ {b}_{2} $ 0.026 44 0.599 $ {b}_{3} $ 0.125 9 −6.233 $ {b}_{4} $ 0.004 285 −2.742 $ {b}_{5} $ −0.033 15 −0.696 1 $ {b}_{6} $ −0.006 923 0.180 4 $ {b}_{7} $ 0.046 14 0.221 $ {b}_{8} $ 0.017 16 0.057 26 将Fourier拟合算法代入数据并与传统赤纬角算法中误差最小的Bourges赤纬角算法和传统时差算法中误差最小的Stine时差算法进行对比,结果如图5、图6所示。

图 5 太阳赤纬角算法对比
Figure 5. Comparison of solar declination calculation

图 6 时差算法对比
Figure 6. Comparison of time difference calculation
由图5和图6可以看出本文提出的Fourier拟合算法计算误差曲线平稳,波动范围稳定,具有良好的鲁棒性。并且在太阳赤纬角的误差曲线中,最大误差与标准值相比只有相差±0.035°,时差的计算误差只有相差±0.044 min,明显优于传统算法中表现良好的Bourges赤纬角算法和Stine时差算法,因此采用Fourier拟合算法作为太阳方位的数据来源具有更精准的跟踪效果。
-
本系统采用Fourier拟合算法作为太阳位置的数据来源,以高精度的太阳高度角和方位角作为跟踪目标角,采用6轴加速度传感器,通过位置姿态公式计算出光伏组件的倾斜角度,以此二者的角度数据建立光学模型[11],并根据三角函数关系驱动光伏组件解决太阳光线在光伏支架轴上的余弦效应。在跟踪方式上相较于容易产生机械误动作的连续式低速跟踪,采用稳定性更好的间歇式跟踪方案[12]。并在接近晨昏时刻开始采用逆跟踪算法,解决板间阴影遮挡问题,实现太阳辐照的最大利用率,同时也能大幅节约用地面积。
本系统设计对硬件结构要求较高,跟踪运行依赖于内部高精度天文算法与外部加速度传感器,如图7所示,与传统光伏跟踪系统相比具有更好的跟踪效率,实际对比效果如表2所示。但支架易受有风天气影响而导致支架晃动,加速度计得到错误数值。为解决风速影响[13],本设计在数据采样的阶段采用了高频滤波的方法,消除因大风而产生的波动性数值。同时在中控器端外接风速仪,当风速达到一定阈值,可通过LoRa(Long Range Radio)通信[14]实现群体进入防风模式,可在一定程度上缓解有风天气对支架的影响。

图 7 系统硬件结构图
Figure 7. System hardware structure
表 2 跟踪效果对比
Table 2. Comparison of tracking effects
跟踪系统 压差式 时钟式 光电式 本系统 跟踪原理 容器压力差 角度时钟化 光敏传感器 拟合算法/
加速度计系统结构 简单 简单 简单 复杂 跟踪效率 低 低 低 高 缺点 受光线影响 累积误差 受光线影响 传感器精度受
有风天气影响 -
计算系统倾斜度的一种常用方法是对陀螺仪[15]角速度的变化率进行时间上的积分。尽管这种方法简单明了,但随着积分周期的增长,陀螺仪的零偏稳定性相关误差也可能快速增大,导致即便系统正处于静止的状态下也可能测量出明显的旋转。因此在某些净加速度或重力加速度的应用中,可利用加速度计来测量静态倾斜角。
在光伏双轴系统的应用中,检测倾斜的一个方法是基于一个参照点分别确定加速度计各个轴的角度,参照点为器件的典型取向,如X轴和Y轴位于水平面内(0 g),Z轴与水平面垂直(1 g),如图8所示。

图 8 独立倾斜检测角
Figure 8. Independent tilt detection angle
通过基本三角函数可分析得出,光伏组件的三轴倾斜度计算公式如下:
$$ \theta = {\tan ^{ - 1}}\frac{{{A_{X,{\rm{OUT}}}}}}{{\sqrt {{A^2}_{Y,{\rm{OUT}}} + {A^2}_{Z,{\rm{OUT}}}} }} $$ (19) $$ \eta = {\tan ^{ - 1}}\frac{{{A_{Y,{\rm{OUT}}}}}}{{\sqrt {{A^2}_{X,{\rm{OUT}}} + {A^2}_{Z,{\rm{OUT}}}} }} $$ (20) $$ \psi = {\tan ^{ - 1}}\frac{{{A_{Z,{\rm{OUT}}}}}}{{\sqrt {{A^2}_{X,{\rm{OUT}}} + {A^2}_{Y,{\rm{OUT}}}} }} $$ (21) 式中:
$ \theta $ ——X轴倾斜度(°);
${A_{X,{\rm{OUT}}}}$ ——X轴加速度值(g);
${A_{Y,{\rm{OUT}}}}$ ——Y轴加速度值(g);
${A_{Z,{\rm{OUT}}}}$ ——Z轴加速度值(g);
$ \eta $ ——Y轴倾斜度(°);
$ \psi $ ——Z轴倾斜度(°)。
-
基于Fourier拟合算法以及计算出光伏组件的倾斜角度动态测量,对单/双轴系统建立光学模型,如图9所示。对太阳光线的余弦效应做轴上的投影,并通过基本的三角函数关系即可获取单轴或双轴的实时跟踪角[16],其计算公式如下:

图 9 视日运动轨迹跟踪光学模型
Figure 9. Optical model of apparent solar motion trajectory tracking
$$ {\theta _1} = {\tan ^{ - 1}}\frac{{\tan \alpha }}{{\sin \beta }} $$ (22) $$ {\theta _2} = {\tan ^{ - 1}}\frac{{\tan \alpha }}{{\cos \beta }} $$ (23) 式中:
$ {\theta _1} $ ——东西方向上的跟踪角(°);
$ a $ ——太阳高度角(°);
$ \beta $ ——太阳方位角(°);
$ {\theta _2} $ ——南北方向上的跟踪角(°)。
在光伏支架跟踪系统中,其跟踪范围一般在±60°以内,而如果组件实时跟随太阳进行跟踪,在早上或傍晚,太阳高度角比较小的时候,此时需要跟踪的角度一般会超过跟踪范围,而停留在±60°的位置,因此前面一排的光伏组件就会对后面一排产生阴影遮挡,如图10所示。同时受到遮挡的光伏组件因表面太阳辐照度的降低,其输出电流则会产生明显下降,从而串联在整排支架中的其他组件会由于木桶效应,整体输出电流也会随之下降,严重的则会产生热斑效应,对光伏组件产生损坏。

图 10 晨昏时刻阴影遮挡示意图
Figure 10. Schematic diagram of shadow shielding at dawn and dusk
目前常见的逆跟踪技术,主要依靠实时检测相邻支架之间光伏组件的输出功率值变化情况来判断是否产生阴影遮挡。当Pn<Pn+1时,则认为第n排支架被n+1支架产生了阴影遮挡情况,即开始驱动支架电机,当$ {\text{fabs}}({P_n} - {P_{n + 1}}) $小于判定阈值时,则认为消除了阴影遮挡。然而该方法极易受到外界光照幅度不确定性变化以及光伏组件自身运行年限增加导致器件退化,从而使得光伏组件输出功率波动的影响。有鉴于此,本文提出一种改进的逆跟踪算法,该算法基于光伏组件角度实时动态测量,其原理如下:
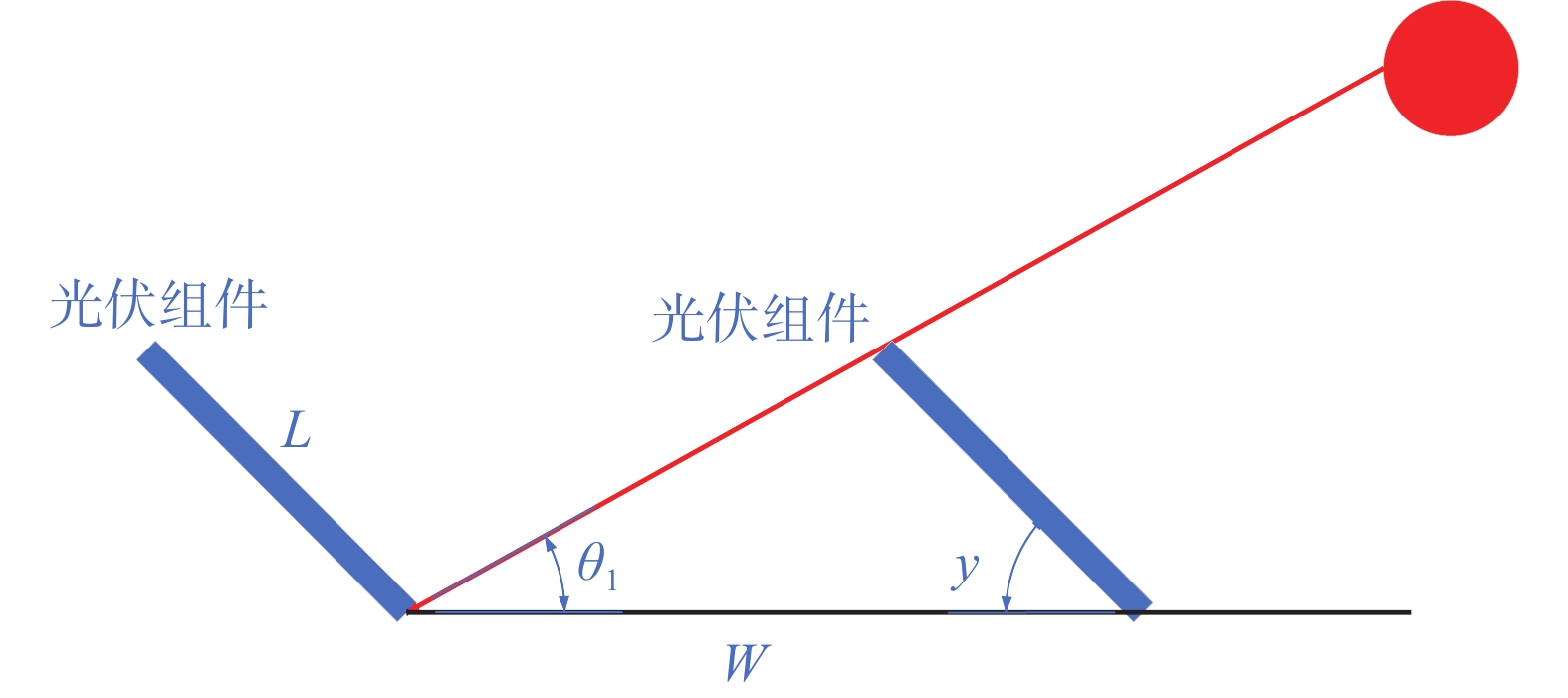
逆向跟踪[17]的启动算法以光伏组件的板宽和支架间距为输入对象,如图11所示,当$ {\theta _1} + y = 90^\circ $时,为正常跟踪与逆追踪的临界角。根据三角函数关系可得临界角${y} = {\cos ^{ - 1}}\left( {\dfrac{L}{W}} \right)$,当$y > {\cos ^{ - 1}}\left( {\dfrac{L}{W}} \right)$则开始逆跟踪。同时根据其几何关系可计算得到逆向跟踪角度:

图 11 逆跟踪算法示意图
Figure 11. Schematic diagram of inverse tracking algorithm
$$ y = {\sin ^{ - 1}}\left( {\frac{W}{L} \times \sin \theta } \right) - \theta $$ (24) 式中:
$ {\text{y}} $ ——逆跟踪角度(°);
$ L $ ——光伏组件的板宽(m);
$ W $ ——两排支架之间的间距(m);
$ \theta $ ——太阳光线在轴上投影的跟踪角(°)。
在光伏发电站设计规范中,要求在冬至日的9:00~15:00不能出现阴影遮挡现象,即需要达到6 h的跟踪时长,以2022年扬州地区为例,通过PVsyst光伏并网仿真软件进行模拟,得到在相同光伏阵列配置情况下,有逆跟踪和无逆跟踪的发电情况对比如表3所示。
表 3 有无逆跟踪效果对比
Table 3. Comparison of reverse tracking effects with and without
光伏组件参数(1.642 m×0.99 m) 无逆跟踪 有逆跟踪 选取地区 扬州 扬州 经度/(°) 119.39 119.39 纬度/(°) 32.37 32.37 板间距/m 4.5 2.7 占地面积/m2 707.1 1 178.496 有效总辐射量/(kWh·m−2) 1 332.7 1 339.2 年发电量/kWh 66 753 67 248 系统效率/% 77.71 81.52 土地利用率/% 36.5 60.8 无阴影遮挡时间/h 9~15 无阴影 数据表明采用逆跟踪算法预估可为光伏发电系统带来约0.7%的发电量提升,且系统效率提高了约3.81%。且在满足冬至日6 h的跟踪时长的条件下,无逆跟踪技术则需要满足板间距达到4.5 m,土地利用率(GCR)计算公式如下式(25)所示,计算结果为36.5%,而采取逆跟踪技术后,光伏组件上将不会产生阴影遮挡情况,可以适度缩小光伏阵列间距到2.7 m,此时根据式(25)得出有逆跟踪的GCR为60.8%,在相同的土地资源上,则节省了约24.3%的占地面积。
$$ {\rm{GCR}} = \dfrac{{{A_{\rm{S}}}}}{{{A_{\rm{G}}}}} $$ (25) 式中:
${{A_{\rm{S}}}}$ ——光伏组件有效面积(m2);
${{A_{\rm{G}}}}$ ——实际占地面积(m2)。
-
目前,在光伏支架的系统应用中,大多采用单电机控制,然而随着大功率机组[18]的应用和技术进步,光伏组件的输出功率不断提高,体积重量不断增加,支架跟踪轴也越来越长,进而导致了1台电机的功率无法驱动整根轴的情况,此时就需要搭配两台乃至多台电机共同进行驱动,而其中不同电机之间或多或少存在个体差异,其转速可能存在细微差别,而随着驱动周期的增长,累积转程误差[19]就会越来越大,从而导致支架轴两边错位互拧,造成机械故障。
因此主从电机协调同步控制则是需要重点解决的问题,为此本文基于交叉耦合的思想,提出1种基于动态角度差程负反馈控制策略,其控制策略图如图12所示。

图 12 同步控制策略图
Figure 12. Synchronous control strategy diagram
角度差程负反馈控制策略以基于重力加速度动态计算所得支架实时角度值为输入对象。太阳轨迹在时间的推移中由式(22)、式(23)计算得出目标跟踪角度,将该角度信号与双电机的实际角度信号做差得到电机执行角度,通过角度控制环进行零度校准做出修正。
MCU通过定时器设置10 ms的采样周期采集电机实时运行角度值,电机电流驱动环在程序内部采用PID调节方式,能够根据实际值与目标值的反馈偏差,通过控制输出不同频率的PWM脉冲信号对主从电机进行扭矩输出控制,从而在转速较快的一端及时控制其转速大小,抑制主从电机的转程误差,实现静态无差,经过实际测试,系统参数如表4所示。
表 4 系统运行参数
Table 4. System operating parameter
同步控制系统参数 数值 额定电压/Vdc 24 负载速度/(r·min−1) 15.3 额定扭矩/(N·m) 100 采样周期/ms 0.01 KP 0.87 KI 0.02 KD 0.001 驱动过程中同时采用间歇式跟踪,设置3°的转程阈值,只有主从电机都完成了该转程阈值,方可进行下一次动作,在一定程度上也可抑制主从电机的转程误差,实际运行数据如图13所示。

图 13 双电机运行角度差
Figure 13. Dual motor running angle difference
通过在一个转程中,对双电机实时运行过程中的角度监测结果可以看出,在第0.7 s和第3.6 s的时间点,跟踪过程中主从减速电机由于通信信号的时延以及各自设备自身参数差异等问题产生了转程差,但在差程负反馈控制的情况下,最慢在2 s的时间内,可将转程差控制在了0°上下,并在5 s的运行周期里,主电机转过的角度和从电机转过的角度差,最大运行误差峰值维持在0.7°不到的限度内,并在转程结束的时间点,可以很好地将角度差收束在0°上下,有效地消除了转程产生的累积误差,对支架机械结构起到良好的保护作用。
-
本文针对现阶段平单轴跟踪器的优缺点和不足,研究了一种太阳运动轨迹定位精度更高,支架跟踪效果更好,可满足大功率负载的光伏跟踪器,主要结论有以下几点:
1)通过研究分析了传统视日运动轨迹算法,借助MATLAB进行仿真对比,结果表明传统赤纬角算法跟踪误差最小为0.35°,时差算法最小误差为0.164 8 min,而本文提出的基于Fourier拟合算法的视日运动轨迹光伏双轴跟踪系统[20]仅为0.035°和0.044 min。因此本文所提出的拟合算法拥有更高的跟踪精度,可达到10−2数量级,较传统算法提高了一个数量级,在跟踪精度上有更高的实用价值。
2)在支架跟踪太阳的方式上,摒弃了传统光电式等易受外界光线变化影响的跟踪方式,采用6轴加速度传感器,并通过内部程序高频滤波,消除外力干扰,在只考虑重力的情况下,计算出光伏组件实时倾斜角度的方法,并结合Fourier拟合算法共同建立出的三维运动模型,以此计算出电机需要动作的跟踪角,实现光伏支架的精准跟踪。
3)同时为解决晨昏时刻光伏组件间的阴影遮挡问题而产生的整体发电效率降低和热斑效应,提出了改进的逆跟踪算法。该算法基于太阳和支架角度,结合光伏组件的板宽和排列间距,得到精确的逆跟踪临界角,在小幅提高发电效率的同时,还可节省约24.3%光伏阵列的用地面积,降低项目用地成本。
4)并考虑在大功率机组应用中,采用主从电机同步控制策略,通过差速和间歇式跟踪双线控制,实现多电机的协调驱动,多台电机控制设备之间采用485通信方式,上限可达256台设备。并通过实际验证结果表明,该同步控制在实现双电机驱动的同时,具有良好的稳定性和协调性。
综上所述,本文所设计的光伏跟踪系统,在太阳运动轨迹定位,支架对太阳的实时跟踪,反阴影跟踪,和大功率负载机组的应用都优于现存的跟踪器系统,从发电的经济收益角度分析,该跟踪系统支架有较好的经济价值和更好的市场应用前景。
基于Fourier拟合的光伏跟踪系统设计
DOI: 10.16516/j.ceec.2024.1.06
CSTR: 32391.14.j.ceec.2024.1.06
作者简介:


通讯作者:
Design of Photovoltaic Tracking System Based on Fourier Fitting
-
摘要:
目的 为提高光伏支架的发电效率,以基于Fourier拟合算法的视日运动轨迹光伏跟踪器为研究设计对象。 方法 借助MATLAB分析了传统视日运动轨迹算法的跟踪精度情况,更进一步地在此基础上提出了精度更优的8阶傅里叶拟合视日运动轨迹跟踪算法,并结合GNSS定位技术,得出太阳实时运行轨迹。系统设计以STM32单片机作为微处理器,采用6轴加速度传感器,通过重力矢量在其轴上的投影确定光伏跟踪支架的实时倾斜度,以此二者建立跟踪支架三维运行模型,通过分析太阳光线在支架上的余弦效应即可得到电机需要运行的动作角。同时为解决晨昏时刻光伏组件间的阴影遮挡问题,系统增加逆跟踪算法。并考虑到大规模机组的应用,提出主从电机同步控制策略。 结果 傅里叶拟合算法拥有更高的跟踪精度,精度可达到10−2数量级,高于传统算法一个数量级。同时采用逆跟踪技术可节约24.3%光伏阵列用地面积,大幅提高了土地利用率。 结论 本研究采用更为精准的视日运动轨迹跟踪模型,较好地解决了太阳辐射利用的余弦效应,提升了电站的发电效率,实现了安全高效绿色能源体系的建设,促进了我国“双碳”目标的推进与达成。 -
关键词:
- 视日运动轨迹 /
- 光伏双轴 /
- 逆跟踪 /
- Fourier拟合算法 /
- 主从电机同步控制策略
Abstract:Introduction In order to improve the power generation efficiency of photovoltaic brackets, the research and design focus is on a photovoltaic tracker based on Fourier fitting algorithm for apparent solar motion trajectory. Method The tracking accuracy of traditional solar motion trajectory algorithms was analyzed using MATLAB. Furthermore and an 8-order Fourier fitting solar motion trajectory tracking algorithm with better accuracy was proposed. The real-time solar motion trajectory was obtained combined with GNSS positioning technology. The system design employed the STM32 microcontroller as the microprocessor and adopted 6-axis acceleration sensor. The real-time tilt of the photovoltaic tracking bracket was determined by the projection of the gravity vector on its axis. Based on this, a three-dimensional operation model of the tracking bracket was established. By analyzing the cosine effect of sunlight on the bracket, the action angle required for the motor to operate can be obtained. At the same time, to solve the problem of shadow shielding between photovoltaic modules at dawn and dusk, the system added an inverse tracking algorithm. Considering the application of large-scale units, a master-slave motor synchronous control strategy was proposed. Result The Fourier fitting algorithm has higher tracking accuracy, reaching an accuracy of 10-2 orders of magnitude, one order of magnitude higher than traditional algorithms. At the same time, reverse tracking technology can save 24.3% of the photovoltaic array land area, significantly improving land use efficiency. Conclusion This study adopts a more accurate apparent solar motion trajectory tracking model, which effectively solves the cosine effect of solar radiation utilization, improves the power generation efficiency of power stations, realizes the construction of a safe and efficient green energy system, and promotes the promotion and achievement of China's goals of carbon peak and carbon neutrality. -
表 1 Fourier拟合系数
Tab. 1. Fourier fitting coefficient
拟合项 赤纬角拟合系数 时差拟合系数 $ k $ 0.017 16 0.013 42 $ {a}_{0} $ 0.313 1 0.407 6 $ {a}_{1} $ −22.66 −3.772 $ {a}_{2} $ −0.327 6 −2.417 $ {a}_{3} $ −0.199 6 4.847 $ {a}_{4} $ −0.002 303 −0.428 4 $ {a}_{5} $ 0.029 45 −1.123 $ {a}_{6} $ 0.010 11 −0.462 1 $ {a}_{7} $ −0.006 882 −0.100 8 $ {a}_{8} $ −0.005 506 0.059 25 $ {b}_{1} $ 4.298 −6.012 $ {b}_{2} $ 0.026 44 0.599 $ {b}_{3} $ 0.125 9 −6.233 $ {b}_{4} $ 0.004 285 −2.742 $ {b}_{5} $ −0.033 15 −0.696 1 $ {b}_{6} $ −0.006 923 0.180 4 $ {b}_{7} $ 0.046 14 0.221 $ {b}_{8} $ 0.017 16 0.057 26  下载: 导出CSV
下载: 导出CSV
表 2 跟踪效果对比
Tab. 2. Comparison of tracking effects
跟踪系统 压差式 时钟式 光电式 本系统 跟踪原理 容器压力差 角度时钟化 光敏传感器 拟合算法/
加速度计系统结构 简单 简单 简单 复杂 跟踪效率 低 低 低 高 缺点 受光线影响 累积误差 受光线影响 传感器精度受
有风天气影响
下载: 导出CSV
表 3 有无逆跟踪效果对比
Tab. 3. Comparison of reverse tracking effects with and without
光伏组件参数(1.642 m×0.99 m) 无逆跟踪 有逆跟踪 选取地区 扬州 扬州 经度/(°) 119.39 119.39 纬度/(°) 32.37 32.37 板间距/m 4.5 2.7 占地面积/m2 707.1 1 178.496 有效总辐射量/(kWh·m−2) 1 332.7 1 339.2 年发电量/kWh 66 753 67 248 系统效率/% 77.71 81.52 土地利用率/% 36.5 60.8 无阴影遮挡时间/h 9~15 无阴影
下载: 导出CSV
表 4 系统运行参数
Tab. 4. System operating parameter
同步控制系统参数 数值 额定电压/Vdc 24 负载速度/(r·min−1) 15.3 额定扭矩/(N·m) 100 采样周期/ms 0.01 KP 0.87 KI 0.02 KD 0.001
下载: 导出CSV
-
[1] 方博闻. 高效陷光钙钛矿太阳能电池与太阳跟踪控制系统的研究 [D]. 桂林: 桂林电子科技大学, 2022. DOI: 10.27049/d.cnki.ggldc.2022.000507. FANG B W. Research on high efficiency light trapping perovskite solar cells and sun tracking control system [D]. Guilin: Guilin University of Electronic Technology, 2022. DOI: 10.27049/d.cnki.ggldc.2022.000507. [2] 丁艳, 袁隆基, 赵培涛, 等. 太阳视日轨迹跟踪算法研究 [J]. 节能, 2020, 39(11): 95-97. DOI: 10.3969/j.issn.1004-7948.2020.11.028. DING Y, YUAN L J, ZHAO P T, et al. Research on tracking algorithm of solar apparent sun trajectory [J]. Energy conservation, 2020, 39(11): 95-97. DOI: 10.3969/j.issn.1004-7948.2020.11.028. [3] COOPER P I. Some factors affecting the absorption of solar radiation in solar stills [J]. Solar energy, 1972, 13(4): 373-381. DOI: 10.1016/0038-092X(72)90003-5. [4] SPENCER J W. Fourier series representation of the position of the sun [J]. Search, 1971, 2(5): 165-172. [5] MEYERS J D, STINE A W B, HARRIGAN A R W, et al. Solar applications in industry and commerce and solar energy fundamentals and designs-with computer applications and active solar collectors and their applications [J]. Journal of solar energy engineering, 1986, 108(2): 160-161. DOI: 10.1115/1.3268085. [6] BOURGES B. Improvement in solar declination computation [J]. Solar energy, 1985, 35(4): 367-369. DOI: 10.1016/0038-092X(85)90144-6. [7] 王士涛, 沈毅, 沈有国, 等. 逆跟踪技术在平单轴跟踪器上的应用 [J]. 太阳能学报, 2021, 42(5): 145-149. DOI: 10.19912/j.0254-0096.tynxb.2020-0443. WANG S T, SHEN Y, SHEN Y G, et al. Backtracking technology applied on horizontal single axis tracker [J]. Acta energiae solaris sinica, 2021, 42(5): 145-149. DOI: 10.19912/j.0254-0096.tynxb.2020-0443. [8] 代兴华, 王海明, 赵瑞杰, 等. 基于双电机的变桨同步控制系统设计 [J]. 微电机, 2021, 54(11): 88-92. DOI: 10.3969/j.issn.1001-6848.2021.11.016. DAI X H, WANG H M, ZHAO R J, et al. Design of pitch synchronous control system based on double motor [J]. Micromotors, 2021, 54(11): 88-92. DOI: 10.3969/j.issn.1001-6848.2021.11.016. [9] 虞炳文, 娄广国, 蔡红维, 等. 光学观测中几种太阳夹角计算方法及精度分析 [J]. 计算机测量与控制, 2022, 30(12): 306-318. DOI: 10.16526/j.cnki.11-4762/tp.2022.12.046. YU B W, LOU G G, CAI H W, et al. Several calculation methods and accuracy analysis of solar angle in optical observation [J]. Computer measurement & control, 2022, 30(12): 306-318. DOI: 10.16526/j.cnki.11-4762/tp.2022.12.046. [10] 邹杰, 冯程鹏, 高欣, 等. 基于正弦和拟合的太阳光追踪算法研究 [J]. 中北大学学报(自然科学版), 2022, 43(3): 200-208. DOI: 10.3969/j.issn.1673-3193.2022.03.002. ZOU J, FENG C P, GAO X, et al. Research on sunlight tracing algorithm based on sine sum fitting [J]. Journal of North University of China (natural science edition), 2022, 43(3): 200-208. DOI: 10.3969/j.issn.1673-3193.2022.03.002. [11] 王佳旺, 吕海英. 光伏发电最大功率追光系统研究与设计 [J]. 科技与创新, 2023(9): 60-62,65. DOI: 10.15913/j.cnki.kjycx.2023.09.017. WANG J W, LÜ H Y. Research and design of maximum power tracking system for photovoltaic power generation [J]. Science and technology & innovation, 2023(9): 60-62,65. DOI: 10.15913/j.cnki.kjycx.2023.09.017. [12] 刘伯明, 张庆海, 赵正旭. 光伏发电双轴逐日跟踪系统设计与实现 [J]. 电子技术应用, 2022, 48(4): 127-131. DOI: 10.16157/j.issn.0258-7998.211862. LIU B M, ZHANG Q H, ZHAO Z X. Design and implementation on dual-shaft daily tracking system for photovoltaic power generation [J]. Application of electronic technique, 2022, 48(4): 127-131. DOI: 10.16157/j.issn.0258-7998.211862. [13] 王万乐. 光伏发电双轴跟踪系统的研究与设计 [D]. 青岛: 山东科技大学, 2018. DOI: 10.27275/d.cnki.gsdku.2018.001384. WANG W L. Research and design of photovoltaic dual-axis tracking system [D]. Qingdao: Shandong University of Science and Technology, 2018. DOI: 10.27275/d.cnki.gsdku.2018.001384. [14] 任加维. 基于物联网技术的双轴联动跟踪式光伏发电系统 [J]. 自动化与仪器仪表, 2022(6): 40-46. DOI: 10.14016/j.cnki.1001-9227.2022.06.040. REN J W. Two-axis linkage tracking photovoltaic power generation system based on the internet of things technology [J]. Automation & instrumentation, 2022(6): 40-46. DOI: 10.14016/j.cnki.1001-9227.2022.06.040. [15] 龙江腾. 基于运动姿态传感器MPU6050的人体手势识别研究 [D]. 南昌: 东华理工大学, 2021. DOI: 10.27145/d.cnki.ghddc.2021.000186. LONG J T. Research on human gesture recognition based on motion attitude sensor MPU6050 [D]. Nanchang: East China University of Technology, 2021. DOI: 10.27145/d.cnki.ghddc.2021.000186. [16] 杨轶霞. 基于网络化最大功率跟踪光伏系统的研究与设计 [D]. 兰州: 兰州理工大学, 2021. DOI: 10.27206/d.cnki.ggsgu.2021.001532. YANG Y X. Research and design of maximum power tracking photovoltaic system based on network [D]. Lanzhou: Lanzhou University of Technology, 2021. DOI: 10.27206/d.cnki.ggsgu.2021.001532. [17] 沈有国, 王士涛, 李彩霞, 等. 双面光伏组件与光伏跟踪系统相结合的应用研究 [J]. 太阳能, 2020(7): 55-61. DOI: 10.19911/j.1003-0417.2020.07.009. SHEN Y G, WANG S T, LI C X, et al. Plication research of bifacial PV module combined with PV tracking system [J]. Solar energy, 2020(7): 55-61. DOI: 10.19911/j.1003-0417.2020.07.009. [18] 胡亮亮. 小型太阳能供电系统及蓄电池充电设计 [D]. 哈尔滨: 东北农业大学, 2017. DOI: 10.7666/d.Y3231559. HU L L. Design of small solar power supply system and battery charging [D]. Harbin: Northeast Agricultural University, 2017. DOI: 10.7666/d.Y3231559. [19] 王欢. 双轴控制的太阳自动跟踪系统实验研究 [D]. 西安: 西安理工大学, 2020. DOI: 10.27398/d.cnki.gxalu.2020.000558. WANG H. Experimental study of two-axis controlled solar automatic tracking system [D]. Xi'an: Xi'an University of Technology, 2020. DOI: 10.27398/d.cnki.gxalu.2020.000558. [20] 李文, 赵永超. 地球椭球模型中太阳位置计算的改进 [J]. 中国科学院大学学报, 2019, 36(3): 363-375. DOI: 10.7523/j.issn.2095-6134.2019.03.010. LI W, ZHAO Y C. The improvement in solar position calculations in the ellipsoid model of the earth [J]. Journal of University of Chinese Academy of Sciences, 2019, 36(3): 363-375. DOI: 10.7523/j.issn.2095-6134.2019.03.010. -


计量
- 文章访问数: 680
- HTML全文浏览量: 444
- PDF下载量: 221
- 被引次数: 0
