









-
托卡马克是一种利用磁场约束等离子体的核聚变装置[1]。在托卡马克装置的运行过程中,会不可避免地出现等离子体电流快速下降到0左右、等离子体在极短时间内失去约束,导致放电终止的现象[2],这种现象被称为等离子体破裂。破裂时等离子体内部的能量会在极短的时间内释放出来,这会对装置造成很大的损伤。现有的大量气体注入(Massive Gas Injection,MGI)[3]、散片弹丸注入(Shattered Pellets Injection,SPI)[4]等技术可以有效缓解破裂带来的危害,但是其作用的时机高度依赖于对等离子体破裂时间的良好预测[5]。
目前破裂预测的技术方案主要分为物理机制驱动和数据驱动[6]。物理机制驱动需要研究等离子体破裂的物理机制,目前有较为初步的破裂分析理论,但是模型较为复杂且非线性[7]。数据驱动则基于机器学习方法,通过对放电运行数据进行学习,将破裂预测转化为一种分类或回归预测的过程[8]。基于数据驱动的破裂预测不需要对破裂发展过程有着深入的理解,只需要有破裂过程中等离子体相关参数的数据,利用这些数据对破裂模型进行训练即可应用,因此现阶段数据驱动模型对破裂预测而言更具有优势。数据驱动的破裂预测多基于机器学习,如JET装置上基于支持向量机(Support Vector Machine,SVM)的先进破裂预测器(Advanced Predictor of Disruptions,AOPDIS)系统[9],ASDEX Upgrade装置上基于ARX(Auto Regressive exogenous)的破裂预测系统[10],DIII-D装置上基于随机森林算法的实时破裂预测器DPRF(Disruption Prediction using Random Forests)[11]等。在J-TEXT装置[12]上同样部署有一些实时运行的破裂预测系统,如针对密度极限破裂的全连接神经网络的实时密度极限破裂预测与避免系统[13]和基于轻量级梯度提升机(Light Gradient Boosting Machine,LightGBM)算法的实时破裂预测器[14]。以上破裂预测系统所采用的算法都是基于传统机器学习方法,而最近基于深度学习(Deep Learning,DL)的神经网络已经被用于训练破裂预测模型。基于深度学习的破裂预测模型除了能够取得较好的预测效果外[15],还在跨托卡马克装置方面有着较好的表现[16-17]。
破裂预测模型需要与等离子体控制系统一起运行,以实时给出破裂概率。实时运行的预测模型需要3部分:实时操作系统、实时软件框架和实时诊断数据。实时操作系统可以为破裂预测程序提供一个可以及时响应的运行环境,能够保证破裂预测程序在规定的时间内被系统执行。实时操作系统目前已经较为成熟,可用的有VxWorks、QNX、Linux-RT等。实时软件框架实现了控制系统中常用的功能如输入输出、定时等功能,使得在开发破裂预测程序时只需要关心核心的算法的实现,其他部分如数据读取、计算结果输出则由实时软件框架提供。JET上的APODIS基于多线程应用实时执行器(Multithreaded Application Real-Time executor,MARTe)实时软件框架进行开发[18],J-TEXT上的基于lightGBM的实时破裂预测基于JRTF(J-TEXT Real-Time Framework)实时软件框架[19]进行开发。实时诊断数据为破裂预测系统的输入,其中实时诊断数据从数据采集设备传输到破裂预测程序这一数据传输过程中的时延和抖动影响了实时破裂预测系统的实时性能;而诊断数据一次传输的数据量则直接决定了破裂预测模型能够获取的输入数据量,会对破裂预测模型的性能产生影响。以上两方面要求提供实时诊断数据的数据采集系统要有较高的数据吞吐率和较低的传输时延,其中较高的数据吞吐率决定了一次传输的诊断数据量,而较低的传输时延则保证了诊断数据传输过程的实时性。
采集数据一般基于网络传输,如ITER上的同步数据网络(Synchronous Databus Network,SDN)[20],EAST上基于反射内存(Reflective Memory,RFM)[21]的实时数据传输网络。ITER SDN基于10 G以太网构建,并进行UDP/IPv4多播,数据包的复制由以太网交换机扇出多播消息来执行。SDN只用于传输实时数据,诊断数据仍然来自于独立的数据采集设备。诊断数据需要通过接口转换模块传输到快速控制器中。快速控制器核心为CPU,运行Linux实时系统,提供实时框架(Real-Time Framework,RTF)运行环境。诊断数据经过处理后,通过SDN发布程序和网卡将数据推送至SDN网络中[22]。快速控制器中网络协议栈基于RTnet[23]协议栈构建,该协议栈同样需要实时Linux环境支持。SDN具有较好的实时性,但是除了必要的数据采集设备外,还需要运行实时Linux的计算机、接口模块、网卡等硬件,系统构建复杂。SDN中诊断数据需要由Linux环境下的程序进行处理,传输时延仍然受到操作系统调度影响。另外,实现实时传输的RTnet协议栈目前已不再更新,暂不知晓RTnet协议栈能否在当下的计算机硬件上进行部署。
EAST等离子体控制系统上采用RFM卡进行组网并传输实时诊断数据。实时诊断数据来源于96输入通道的DTACQ数据采集卡,并采用隔离放大器将来自于不同诊断阵列的输入信号进行隔离[24]。RFM卡间采用超高速光纤通信,多块RFM互联构成数据共享网络。每个RFM卡为网络中的一个节点,每个节点都具有共享内存的独立副本。当采集数据写入本地节点时,RFM卡会捕获数据并发送到RFM网络中,短时间内网络中所有节点都会将该数据写入到同一地址中,从而完成整个RFM网络的数据更新[21]。RFM网络的数据传输时延主要为所有RFM节点的数据更新时延,RFM卡在数据量较小的情况下数据更新的延时较低,但是随着数据量的不断增大,延迟会显著增加。KSTAR数据网络上对RFM网络与10 G网速的SDN进行数据吞吐量测试[25],RFM网络的读写速度均较小,写入速度为25 Mb/s,读取速度为285 Mb/s;而SDN的读写速度均可以达到9 788 Mb/s,几乎占满整个带宽。RFM网络数据吞吐率较低的原因主要由其工作方式决定,如5565PIORC反射内存卡,其单次能够传输的数据长度被限制在4~64字节以内,而且RFM卡必须板载内存才能存储实时数据,板载内存最大仅有256 M字节。极短的数据长度和较小的板载内存限制了RFM网络的数据吞吐率。为了获得较好的实时性能,必须限制RFM网络内的节点数量或单次数据更新的大小。
研究[14]中的实时破裂预测系统需要实时诊断数据,而J-TEXT装置上的数据采集与传输系统并不具有实时性,采集系统会在一炮实验后将数据写入到MDSplus数据库中[26],这种方法使得当前实验的等离子体数据只能在实验结束后获取,无法被等离子体实时控制系统或其他实时运行程序使用。因此研究[14]中采用了独立的数据采集设备用于获取实时诊断数据,并通过接口转换模块将实时数据直接传输到运行实时破裂预测程序的计算机中,中控通过远程的方式与破裂预测系统进行通信,总体系统架构与SDN较为类似。由于输入信号来自不同的诊断系统,还需要在相应诊断的输出与采集设备的输入间加入多道模拟隔离,减轻不同诊断间的干扰。
目前在J-TEXT上开展的基于深度学习的跨装置破裂预测研究[27]以离线方式运行。该破裂预测模型使用了J-TEXT装置如电子密度、纵场强度等诊断信号,部分诊断信号、使用数量以及诊断信号在J-TEXT上的采样率见表1。在表1的诊断中,Mirnov线圈[28]和鞍形线圈[29]能够分别测量等离子体高频磁扰动和低频磁扰动,可以直接反映磁流体力学不稳定性信息。SXR[30]、CIII杂质[31]、AXUV[32]为辐射诊断,能反映等离子体温度、总辐射功率、杂质等信息。电子密度能够直接反映等离子体密度信息[33],垂直位移和径向位移则能够反映等离子体位移信息。余下诊断如等离子体电流、纵场强度和环电压与等离子体运行状态密切相关。以上诊断从磁、辐射、杂质等角度为深度学习破裂预测模型提供了丰富的等离子体状态信息,因此在深度学习破裂预测模型实时化时,以上诊断都需要被采集,得到的实时诊断数据都需要被实时传输到破裂预测模型中。
表 1 基于深度学习的破裂预测模型使用的J-TEXT装置上的部分诊断信号以及采样率
Table 1. Part of diagnostic signals on J-TEXT devices used in DL-based disruption prediction models and the sampling rate
使用信号 通道数量/道 J-TXET装置上
采样率/(Sa·s-1)等离子体电流Ip 1 10 k 纵场强度Bt 1 10 k 环电压Vloop 1 10 k 径向位移dr 1 10 k 垂直位移dz 1 10 k 碳III杂质辐射CIII 1 500 k 软X射线SXR 15 500 k 绝对极紫外线辐射AXUV 16 500 k 鞍形线圈exsad 4 250 k 软X射线中心通道SXR_MID 1 500 k Mirnov线圈Mirnov 4 500 k 表1中的诊断在J-TEXT装置上都采用16位分辨率、10 k~500 k Sa/s的采集卡进行采集,采集卡输出数据的位宽为16位。将所有诊断信号的采样率乘以数据位宽并累加,得到表1中所有诊断数据同时传输时,数据输出速率约为313 Mb/s。考虑到破裂预测程序实时运行周期为1 ms,若参考研究[34]中的平均约100 μs的数据传输时延,则数据采集系统的数据吞吐率至少要达到3.13 Gb/s以上,才能保证以上诊断数据的完整传输。
为实现深度学习破裂预测模型在J-TEXT装置上的实时运行,必须先建立一个支持实时数据传输的数据采集系统。文章提出了一种实时数据采集系统的设计方法。该数据采集系统基于模块化的结构进行设计,分为多通道数据采集模块、模数转换器(Analog-to-Digital Converter,ADC)转换控制和数据读取模块、数据分组与封装模块和数据传输网络模块。多通道数据采集模块和ADC转换控制和数据读取模块完成诊断信号的数字化并生成实时诊断数据流。数据分组与封装模块基于实时诊断数据流生成分立的采样片。数据传输网络模块采样片传输到运行实时破裂预测程序的计算机中,完成实时诊断数据的传输。数据传输网络模块基于运行在FPGA上的硬件UDP网络协议栈进行构建,可以直接与传统以太网设备连接。该UDP协议栈运行在10 Gb/s的网速下,具有较高的数据吞吐率和很低的数据传输时延。
-
基于前文中的分析,实时数据采集系统需要满足以下指标:
1)对输入信号进行较高精度测量。采集系统本质属于测量设备,能够以较低误差测量输入信号是测量设备最基本的功能要求。
2)每通道实现高采样率。每通道采样率要达到2 MSa/s。J-TEXT上绝大部分诊断信号的现有采样率不会超过2 MSa/s,2 MSa/s采样率足够对绝大部分信号进行实时采集与传输。
3)保证较高的数据吞吐率。基于对表1中的数据输出速率的分析,数据采集系统至少要具备3.13 Gb/s的数据吞吐率。
4)数据传输时延要尽可能低。数据传输时延会直接影响到破裂预测系统的实时性能,这里暂定数据传输时延不高于50 μs。
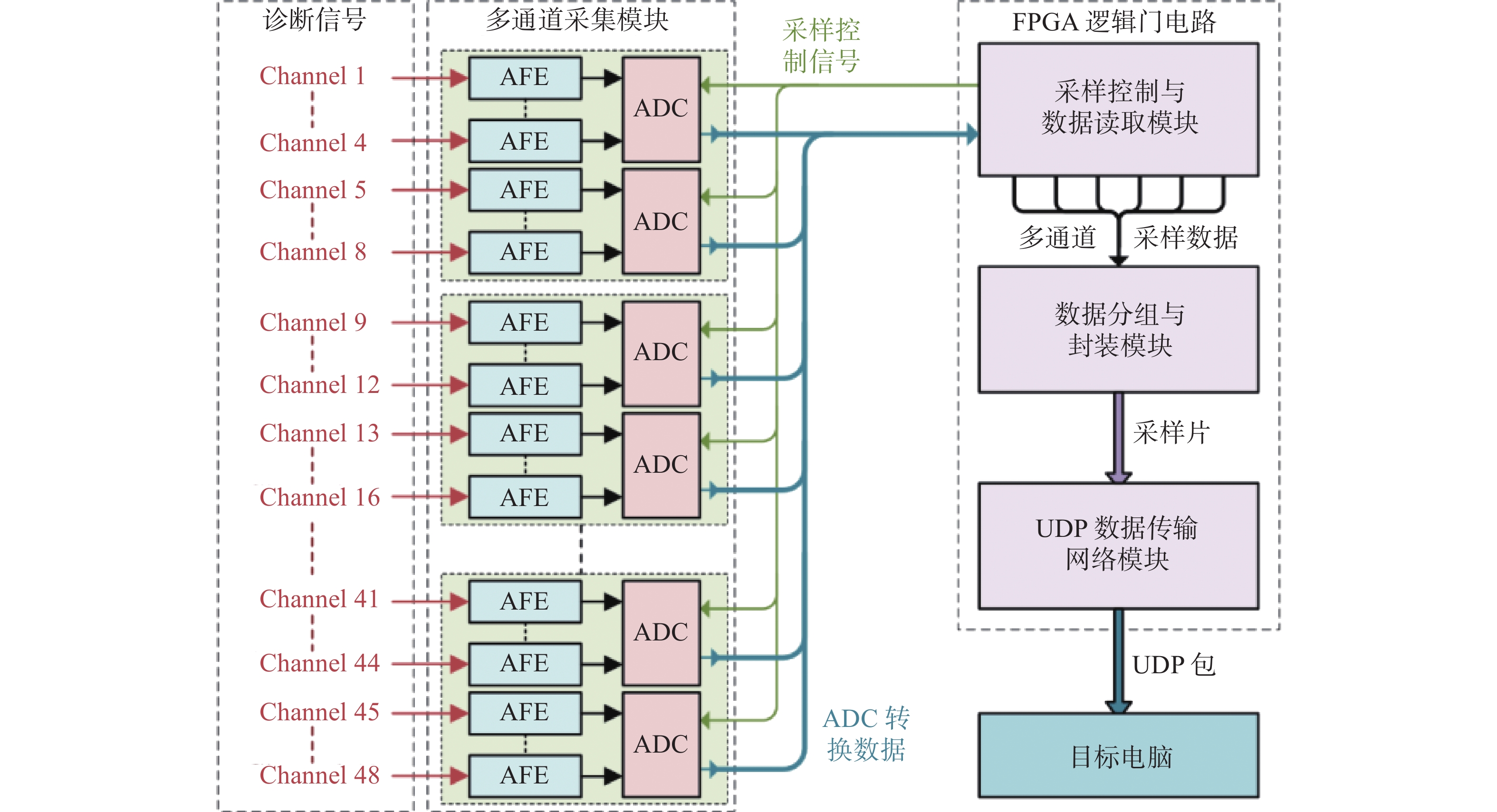
按照系统功能和指标,给出实时数据采集系统的设计结构,如图1所示。

图 1 实时数据采集系统结构图
Figure 1. Structure diagram of the real-time data acquisition system
实时数据采集系统可分为4个部分:
1)多通道采集模块,主要完成对输入诊断信号的采集与转换,输出实时诊断数据流。模块包含两个部分,用于对原始模拟信号进行调制、滤波、衰减等处理的模拟前端电路(Analog-Front-End circuit,AFE)和用于将模拟信号转换为数字信号的ADC。单个采集模块支持8通道模拟信号输入,可通过增加采集模块的方式实现更多路模拟信号输入。
2)ADC采样控制和数据读取模块,负责控制ADC完成采集、转换等行为,并读取ADC转换出的数据。
3)数据分组与封装模块,负责将多通道的ADC数据按照一定顺序组成可供传输的数据包,并添加数据包标识信息。
4)数据传输网络模块。主要运行一个10 G UDP协议栈,将数据包传输到目标电脑。采用10 G网速可以减小传输时延,提高实时性。
-
该模块主要包含两个部分:AFE电路和ADC。其中ADC选择ADI公司的LTC2324型号同步采样ADC,每个采集模块放置两个LTC2324,实现单采集模块支持8通道模拟输入的功能。AFE电路主要完成原始模拟信号的衰减和滤波,电路结构如图2所示。

图 2 模拟前端电路图
Figure 2. Diagram of analog front-end circuit
两路差分输入信号首先通过一个5.1 kΩ和30 pF组成的低通滤波器,再连接到两个OPA197的同相输入端。OPA197被配置为电压跟随器,起到阻抗变换的作用。OPA197同相输入端连接一对肖特基二极管,可以将OPA197的输入电压限制在-6.3~6.3 V之间。OPA197的输出连接到THS4551全差分衰减级,2.4 kΩ和7.5 kΩ的电阻配置可实现0.32倍的差分增益。2.4 kΩ电阻与68 pF电容构成另外一个低通滤波器。由于LTC2324无法输入负电压,需要给THS4551提供合适的共模电压VOCM,使THS4551的差分输出电压全程高于0 V。这里设置共模电压为2.048 V。
对整个AFE电路采用LTspice软件进行元件级别仿真,主要进行频域仿真得到其增益随频率变化的曲线,并确定-3 dB点。仅对ADC+引脚输出的单端电压进行100 Hz~10 MHz的频域扫描,结果如图3所示。通带内增益为-15.92 dB,对应0.16倍的单端增益,差分增益为单端增益的两倍,为0.32倍,与设计一致。-3 dB点对应频率为650 kHz,足以支持对50 kHz频带内的信号实现无衰减采集。
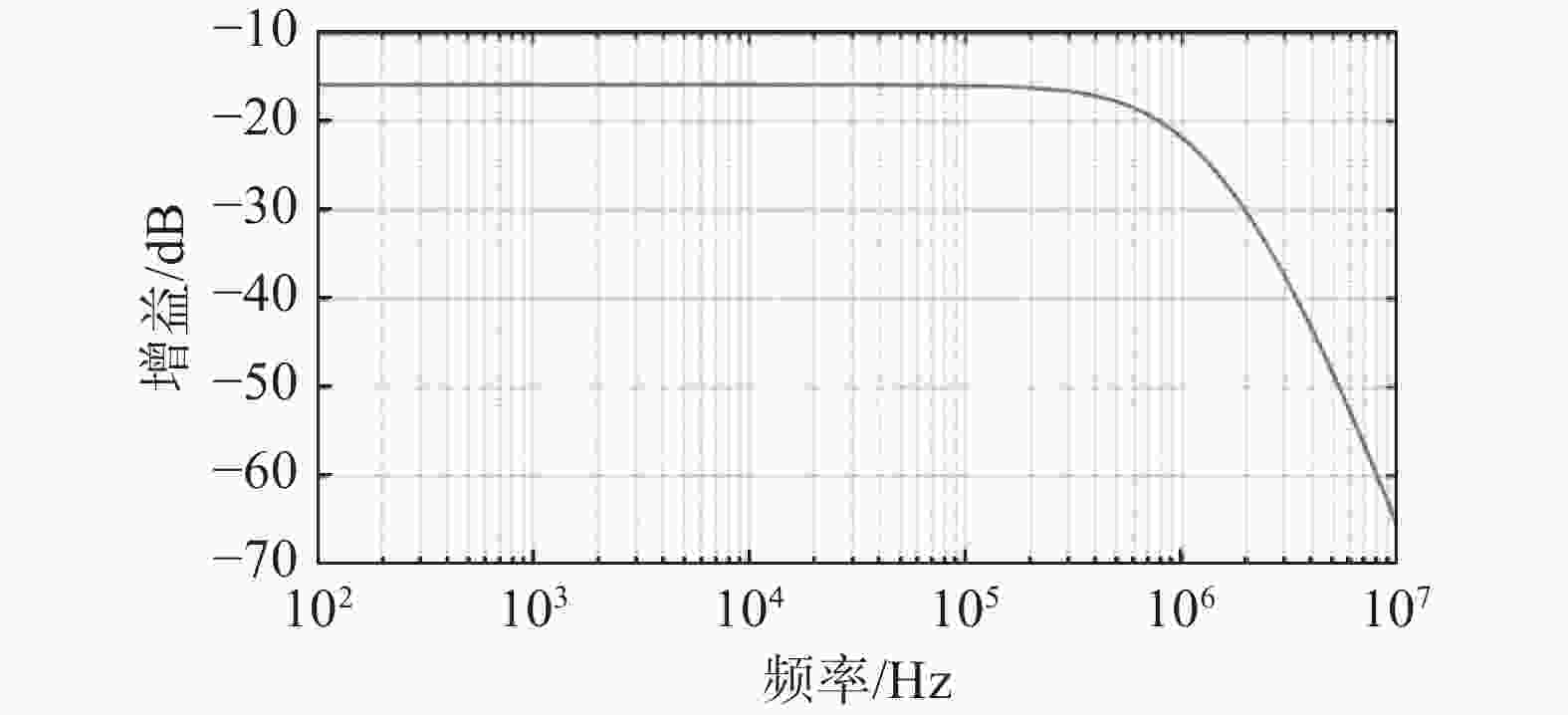
图 3 模拟前端电路增益-频率曲线
Figure 3. Gain-frequency curve of the analog front-end circuit
-
ADC是采集系统的核心之一,必须对ADC进行正确的转换控制和数据读取。LTC2324为4通道同步采样ADC,具备16 位分辨率,可实现每通道2 MSa/s采样率的信号采集与转换。
LTC2324通过CNV引脚上的下降沿信号开启采集与转换。LTC2324具备220 ns的转换时间,在CNV下降沿后约220 ns输出转换数据。每通道转换数据通过独立的SDO(Serial Data Output)数据线输出,ADC数据读取模块需要通过四路SDO数据线读取LTC2324转换数据。LTC2324上SDO输出逻辑电路所需驱动时钟由FPGA提供,为100 MHz。
ADC采样控制和数据读取模块的核心是有限状态机(Finite State Machine,FSM)和计数器。计数器由100 MHz时钟驱动,从0到上限值的时间为采样周期。FSM具体结构如图4所示,它有4种状态,当计数器等于特定值时,当前状态发生变化,切换到下一种状态。
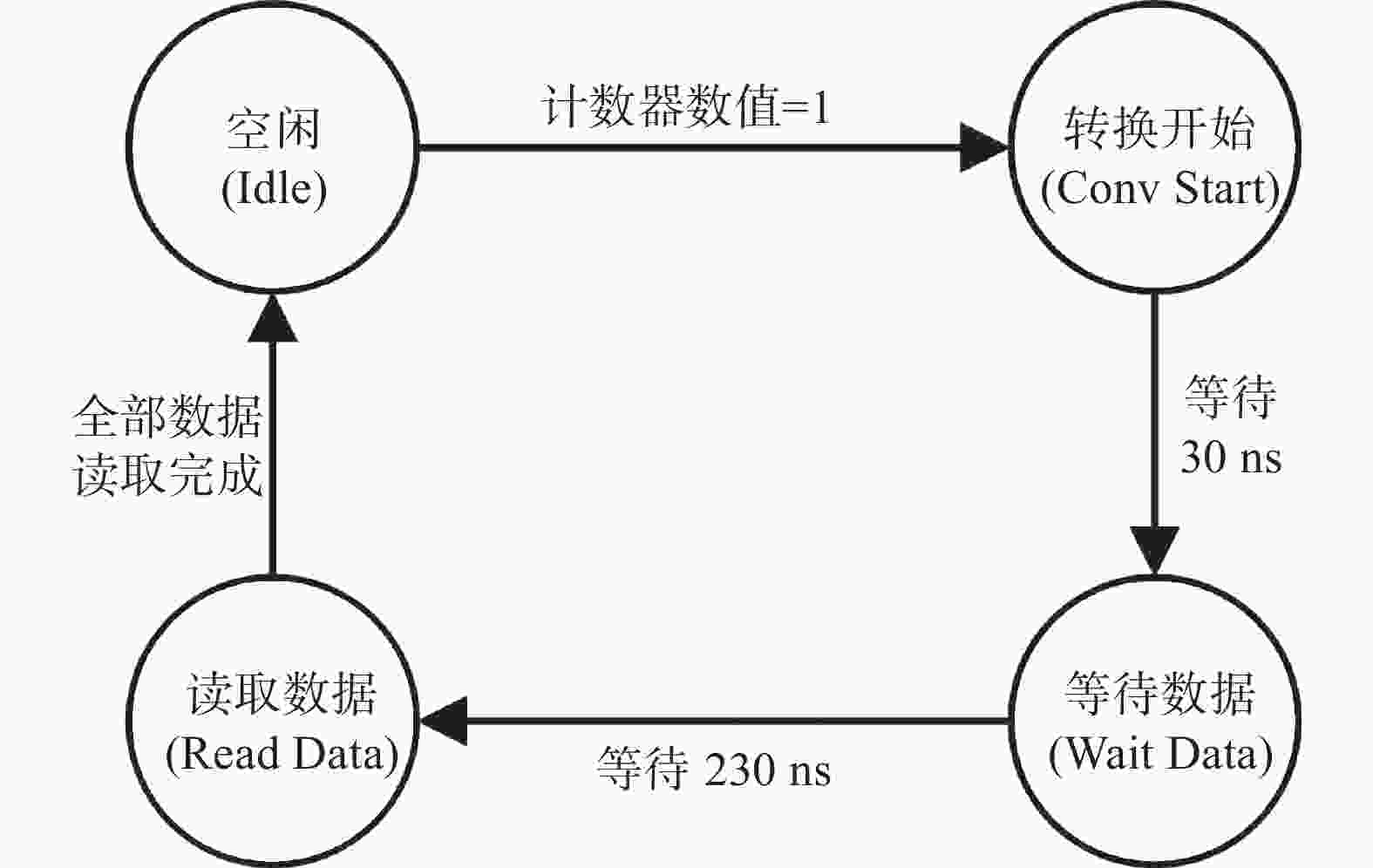
图 4 FSM状态转换图
Figure 4. Diagram of state change of FSM
状态机分为四个状态 :
1)空闲(Idle)状态:此时ADC处于空闲状态,保持CNV信号为低电平。当计数器当前数值为1时,状态机进入Conv Start状态。
2)开启转换(Conv Start)状态:此时ADC控制器将CNV信号拉高一段时间后拉低,使CNV信号具备一个下降沿,从而开启ADC采集与转换。CNV高电平时间根据LTC2324数据手册中给出指标确定,为30 ns。CNV信号下降沿后状态机进入Wait Data状态。
3)等待数据(Wait Data)状态:此时ADC处于对输入模拟信号进行采集与转换状态,状态机只进行计数与等待,不对任何信号进行操作。此状态维持约230 ns,等待时间结束后进入Read Data状态。
4)读取数据(Read Data)状态:此时ADC控制器通过四路SPI接口读取LTC2324的4个通道转换数据。SPI时钟与计数器时钟一致,为100 MHz。经过16个SPI时钟周期后数据读取完毕,状态机重新回到Idle状态。
状态机不影响计数器运行。当计数器当前值重新为1时,状态机重新从Idle状态跳转至Conv Start状态,开启下一次ADC转换与数据读取操作。由于ADC采样控制和数据读取是周期性进行的,诊断数据可以周期性地输出到后续的模块,形成连续输出的诊断数据流。
-
采样数据通过UDP网络传输到运行实时破裂预测程序的计算机。采样数据被包含在UDP数据包中,程序读取该数据包时会读取到UDP数据包中的载荷(Payload)部分。Payload为一个长字符串,由多个ADC采样数据组成。若不对Payload中的ADC采样数据进行排序,程序就无法获取Payload中采样数据的分布信息,极容易造成数据读取失败。为确保程序能够正确有序地读取UDP包中的多个通道、多次采样的ADC数据,需要设计ADC采样数据的排序与组织方法,将单个UDP包中所包含的ADC采样数据进行分组和排序。另外由于诊断数据流可能无法被一个UDP包完整发送,还需要将诊断数据流切片,每一个数据片可以被封装入一个UDP包中并被发送出去。
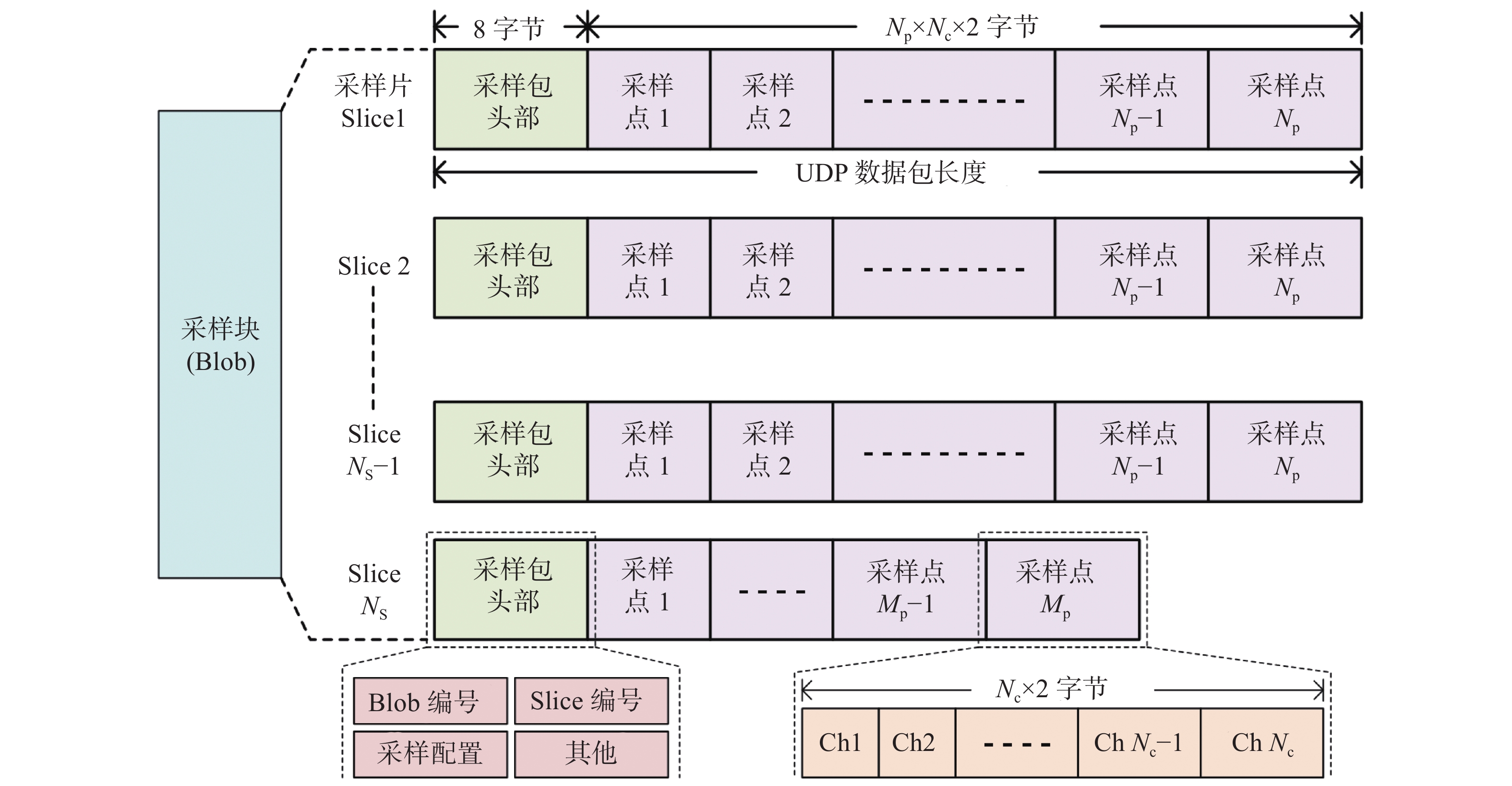
实时数据采集系统中实现的数据分组和封装方法如图5所示。

图 5 数据分组和封装方法示意图
Figure 5. Diagram of the data grouping and packing method
数据分组和封装模块中最基本的数据单元为采样点(Sample Point),不可分割。每个采样点由所有使用到的ADC采样通道输出的数据组成。使用到的ADC采样通道数量为NC(Number of Channels),为系统工作所必需的参数,在数据采集系统开始工作后则不允许被修改。单个采样点内的所有数据即为一次采样获得诊断数据。LTC2324为16位ADC,则单个采样点的数据长度为2NC,单位为字节。
实时破裂预测程序为周期性运行程序,每一次运行时程序需要的所有诊断数据将被合成为一个采样块(Sample blob)进行传输。采样块的数据长度可能会超过单个网络包可传输的数据长度,因此需要按照一个数据包长度将采样块划分为多个采样片(Sample slice),每个采样片由一个UDP包传输。每个采样片由8个字节长度的头部数据和采样数据构成。头部数据主要包括采样块编号、采样片编号、采样配置等信息。基于采样块和采样片编号可以唯一标识采集系统传输的数据包。
根据采样块内总的采样点数量、每个采样点的数据长度可以计算得到采样块的总数据长度,单位为字节。结合采样块总数据量和UDP数据包长度,可以计算得到采样片的数量NS(Number of Slices)。结合UDP数据包长度、单个采样点的数据长度和头部信息数据长度,可以计算得到前NS-1个采样片内部的采样点数量NP(Number of Points)和最后一个采样片内部的采样点数量MP。NS、NP和MP参数为数据分组与封装模块正常工作必需的参数,需要在系统开始运行前计算得到。
-
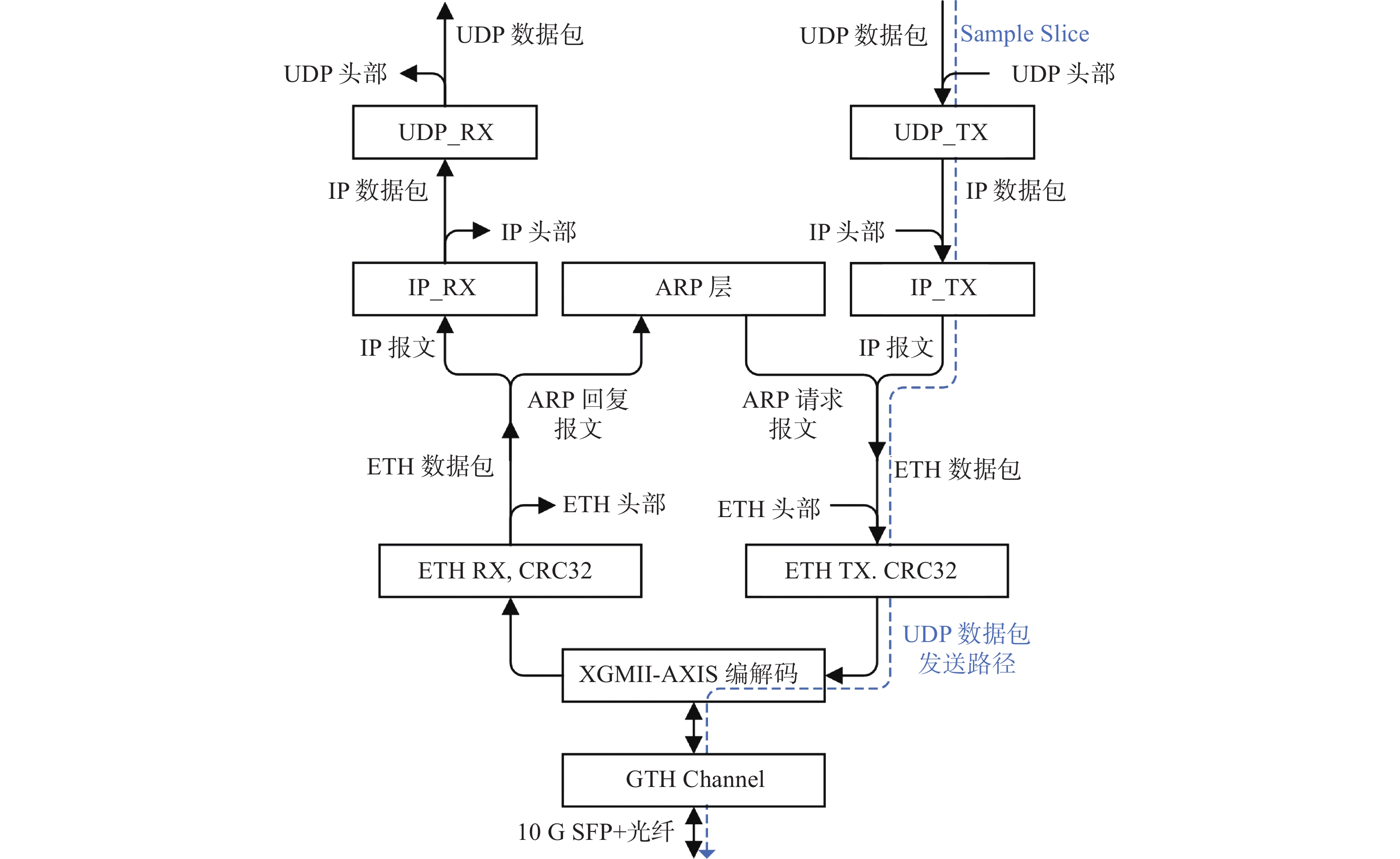
研究中已经在FPGA上完成了UDP协议栈的设计与部署。实时UDP网络协议栈基于分层的方式进行设计,具体结构如图6所示。

图 6 UDP网络协议栈结构图
Figure 6. Structure diagram of the UDP network stack
物理层基于FPGA自带的GTH收发器和10 G SPF+光纤组成,基于光接入的以太网具有抗干扰性强、线路距离长的优点。ETH层、IP层、UDP层的基本功能都是检查输入报文的头部信息是否满足要求,满足则拆分出数据包交给下一层,不满足则丢弃当下报文。应用层需要自行设计,主要功能调用整个网络的发送功能,将采样片通过UDP数据包发送出去。由于该UDP协议栈仅作为数据发送源而不需要进行任何UDP包的接收,因此在应用层没有做UDP数据包的接收与处理。
在UDP协议栈开始向运行破裂预测程序的实时计算机发送数据包前,需要先发送ARP请求包以得到实时计算机的MAC和IP地址。此时协议栈无法发送任何UDP数据包。只有在收到实时计算机的ARP回复包并获取实时计算机的MAC和IP地址后,协议栈才能切换到UDP数据包发送状态。该ARP回复包除了可以用于获取实时计算机的MAC和IP地址外,还兼具网络连通性检测功能,因为只有在网络连通并顺畅的情况下,UDP协议栈才能收到ARP回复包,否则无法收到ARP包,也无法发送UDP包。
-
根据实时数据采集系统需要满足的指标,需要针对系统进行以下测试:
1)测量精度测试和采样率测试。主要针对采集模块进行测试。测量精度要求进行直流信号和交流信号测试。
2)数据吞吐率测试。主要针对数据传输网络进行测试,测试其数据传输速率。
3)数据完整性测试,主要检测采样数据从数据分组与封装模块的处理到目标计算机读取采样数据整个流程中是否出现数据丢失。
4)数据传输时延测试,主要测试UDP数据包的传输时延。
-
测试前首先需要获取采集模块的模拟输入到数字输出的传递函数(Transfer Function from Analog input to Digital output,TFAD),在读取ADC转换数据后即可采用传递函数TFAD计算得到模块输入电压的测量值。TFAD一般根据输入值和输出值,经过拟合得到。拟合采用的模拟输入为一系列特定的直流电压值,输入电压由AFG3022B信号源提供,由DMM4020万用表测量。数字输出为ADC转换出的65 536个采集样本的平均值。输入输出数据采用Matlab软件的cftool(Curve Fitting Tool)工具箱进行拟合。单个通道的拟合结果如式(1)所示。
$$ D_{\mathrm{out}}=2\ 558.126\ 6V_{\mathrm{Ain}}-4.860\ 5 $$ (1) 式中:
Dout ——采集模块输出数据(Least Significant Bit,LSB);
VAin ——采集模块输入电压(V)。
式(1)为一个带截距项的一次函数,TFAD一般为一次函数。式(1)在cftool下拟合时,cftool给出R2为1,说明拟合效果很好。
-
直流测量误差和交流测量误差分别表征数据采集系统的直流和交流精度。直流测试下,输入特定的直流电压,使用65 536个转换数据的平均值作为ADC转换结果。交流测试下,输入10 V幅值、70 Hz~200 kHz频率的交流信号,计算65 536个转换数据的有效值。采用拟合出的TFAD计算测量得到的直流电压值和交流电压有效值,以DMM4020的测量值为基准,计算相对误差。
直流测试结果如图7所示,误差最大为-0.048%,最小约为0.02%,模块整体具备较高的精度。
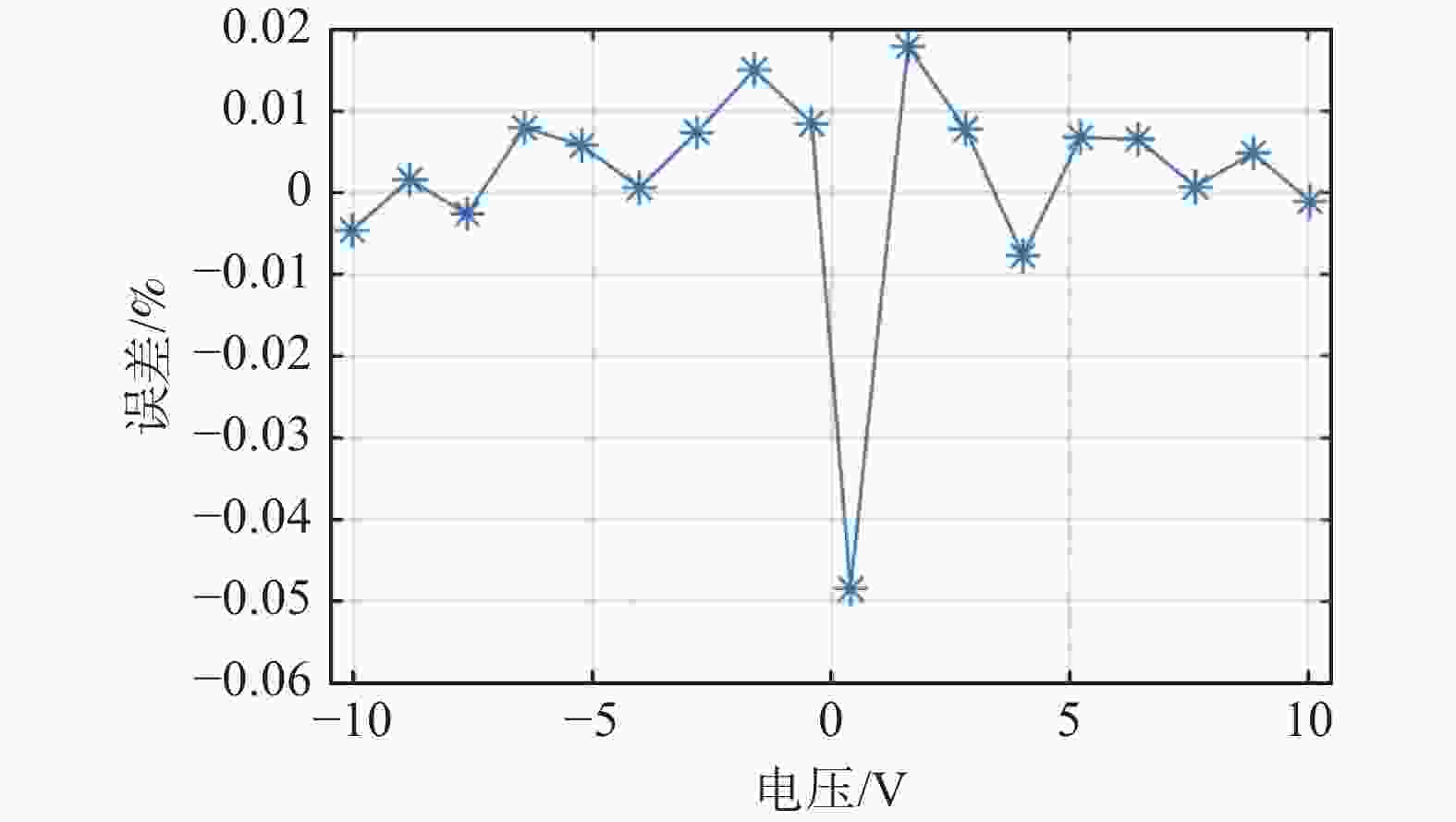
图 7 直流测试相对误差曲线
Figure 7. Relative error curve of DC test
交流测试结果如图8所示,70 Hz~10 kHz频带内精度均在-0.25%左右,在50 kHz下相对误差为0.2%,在100 kHz下相对误差达到1.2%。由于模拟前端为一个二阶低通滤波器,100 kHz及以后频率已经接近其-3 dB点,增益下降,误差上升。

图 8 交流测试相对误差曲线
Figure 8. Relative error curve of AC test
-
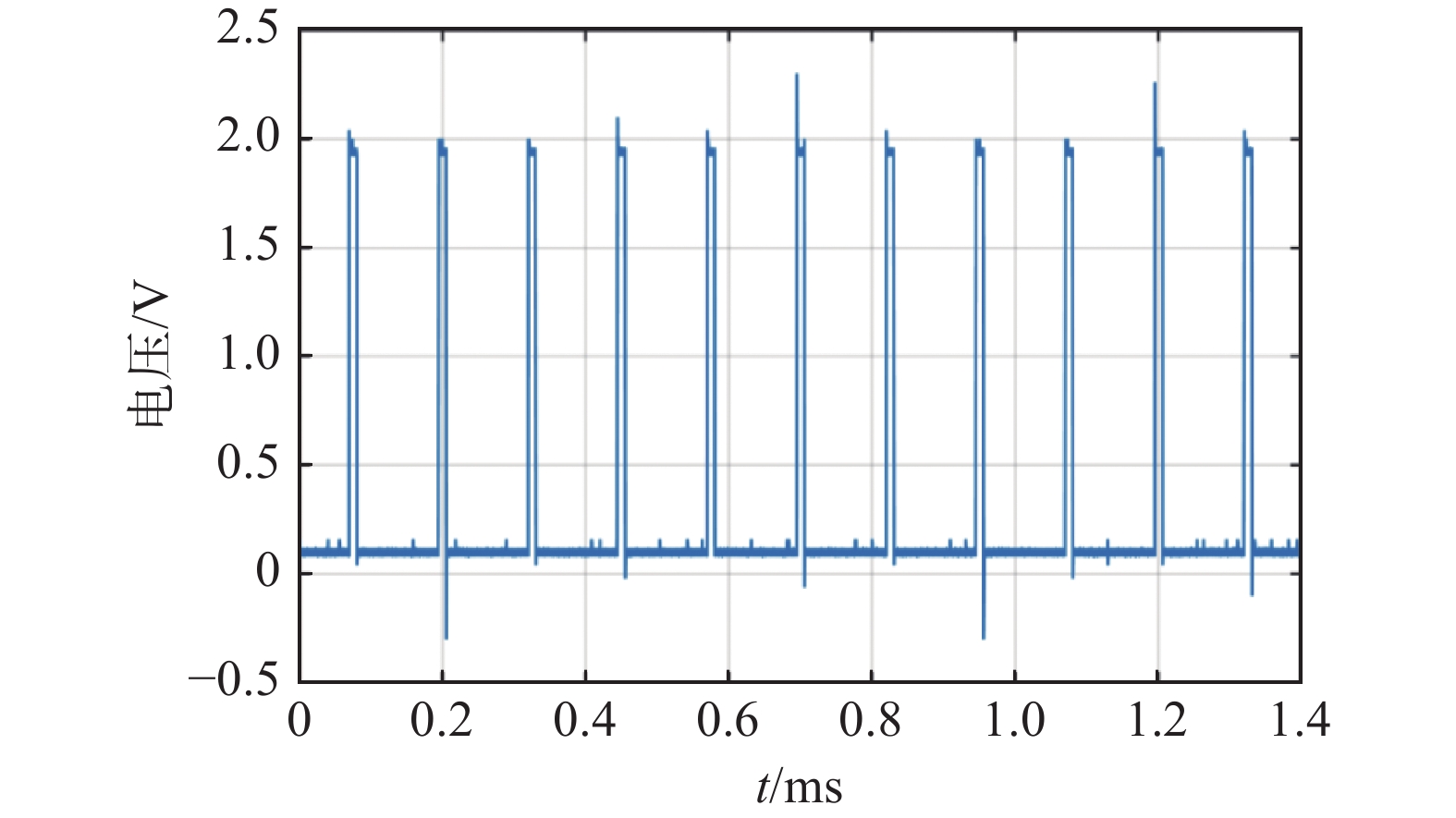
采样率可以直接测量LTC2324 CNV引脚上的采样触发信号的频率得到。CNV引脚上的信号波形如图9所示。

图 9 LTC2324 CNV引脚上采样触发信号波形
Figure 9. Waveform of sampling trigger signal on LTC2324 CNV pin
根据图9,采样触发信号具有500 ns的周期,即每500 ns开启一次采样,则采集模块的采样为2 MSa/s,达到预期设计。
-
数据吞吐率测试主要测试UDP网络的数据传输速率。设置10 G UDP协议栈工作于循环发送数据模式。由于UDP协议栈为FPGA上的硬件电路,当数据包长度固定时,UDP协议栈的收发行为也是确定的,表现为在固定的时长内进行一次UDP数据包的发送或接收。用UDP数据包的长度除以一次发送时间,即可得到UDP协议栈的数据传输速率。
UDP协议栈的发送状态采用FPGA上的IO进行观测。当UDP协议栈发送数据时,IO输出高电平,反之IO输出低电平。IO电平的周期即为发送一个UDP数据包所需时间。设置发送时UDP数据包的数据长度为1 448字节,则UDP协议栈的发送观测IO波形如图10所示。

图 10 UDP TX观测IO波形
Figure 10. Waveform of UDP TX observation IO
由图10,TX观测IO波形具有固定的周期,其周期约为1.241 μs,频率为805.4 kHz,说明UDP协议栈可以在1.241 μs内进行一次UDP数据包的发送。由UDP数据包中包含1 448字节的数据部分,乘以发送频率,得到数据传输速率约为9.33 Gb/s。采用相同的方法进行测试,此时设置UDP数据长度为2 008字节,得到数据传输速率约为9.51 Gb/s。基于该项测试,UDP协议栈的数据吞吐率远高于设计指标中要求的3.13 Gb/s。
-
由于目前缺少运行实时破裂预测程序的计算机,数据完整性测试中要求的对采集系统发送的UDP数据包的读取采用Wireshark和Matlab两个软件。Wireshark抓取UDP包并将数据部分导出到TXT文件。Matlab读取TXT文件,拆分出采样片头部,按顺序读取每个通道的转换结果。通过TFAD和读取出的数据,计算输入电压。
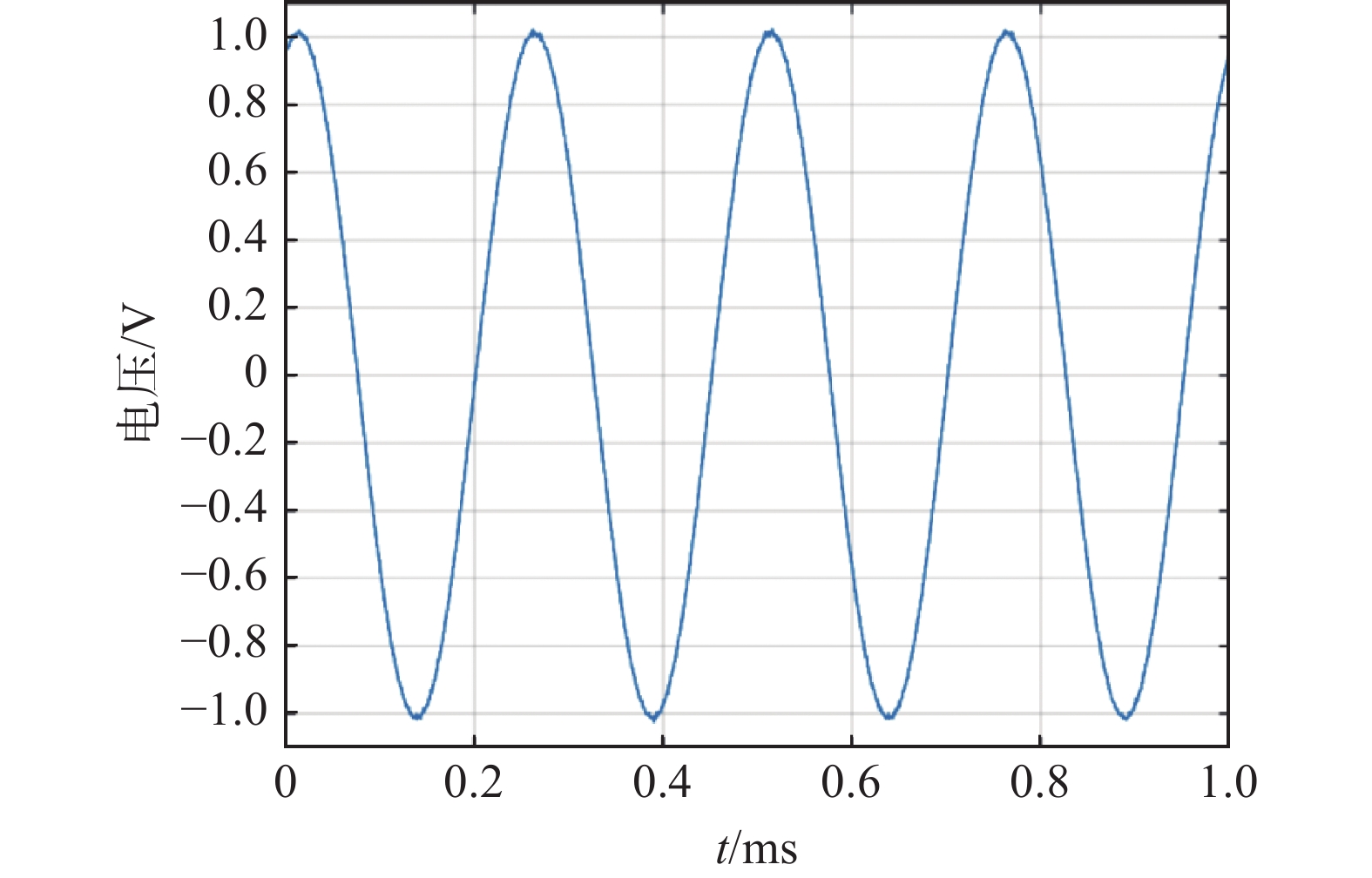
FPGA上设置单次采样任务包含250个采样点,包含4个采样通道,则一个采样块包含头部和采样数据一共2 008字节。设置UDP数据包传输的数据长度为2 008字节,则单个采样块可以由一个UDP包发送。连续读取8个数据包的采样数据,并绘制其中第一个通道转换结果,如图11所示。
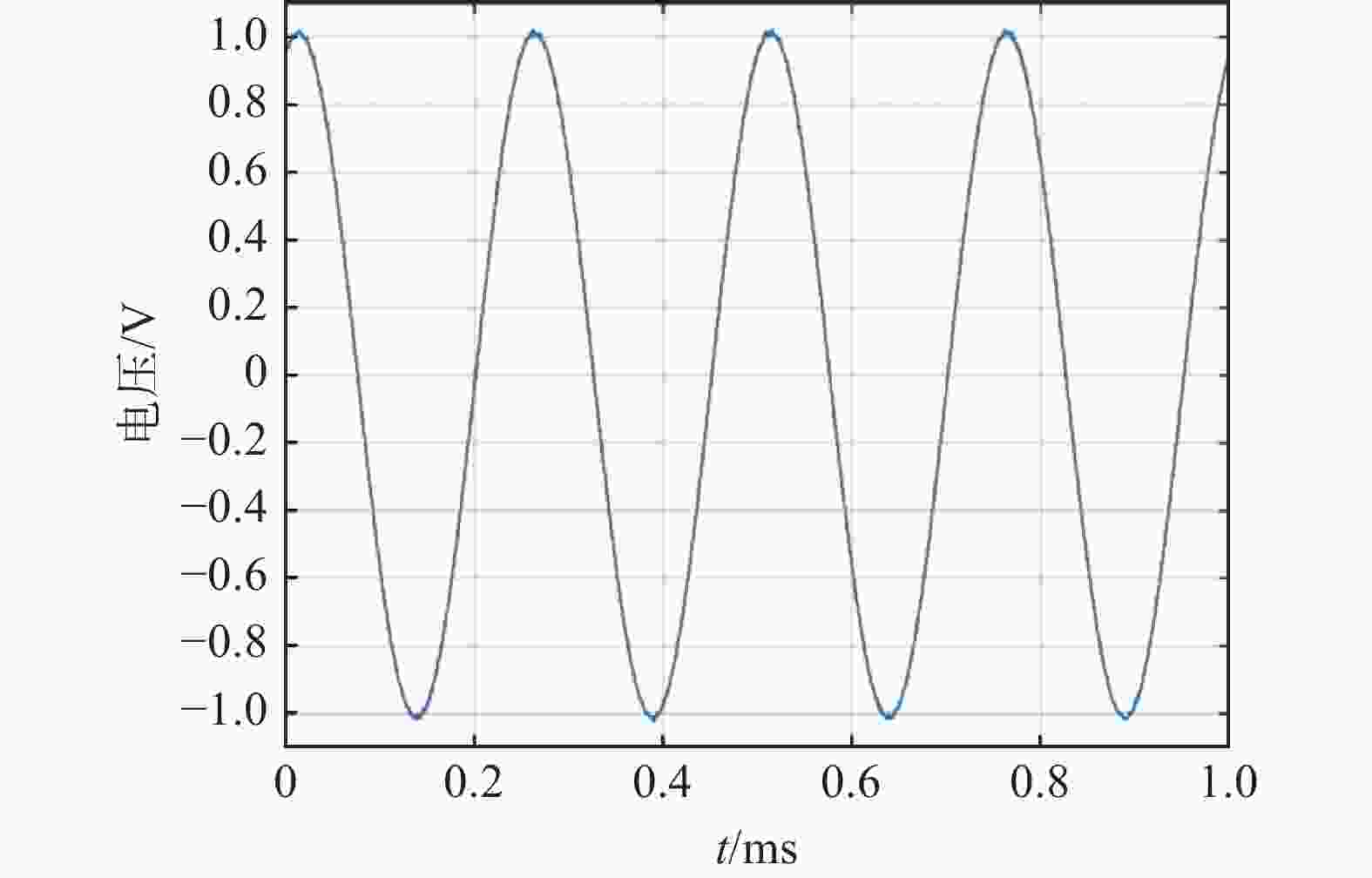
图 11 第一通道测量波形图
Figure 11. Waveform of first channel measurement
该通道运行于2 MSa/s采样率下,输入信号为两路4 kHz、1 Vpp,相差180°相位的差分正弦波信号。根据图11,正弦波没有出现间断,波形完整,说明传输采集数据时没有丢失任何数据点。测量波形的幅值为1.012 V,采用3.2小节中的交流测试方法,计算得到本次测量的相对误差为0.20%。
-
传输时延主要为UDP包从数据传输网络模块传输到实时破裂预测程序中的时间。该时间需要在两个设备上进行测试,且目前缺少运行实时破裂预测程序的计算机,目前传输时延暂时无法测试。
除了直接测试传输时延外,还可以通过RTT(Round-Trip Time,环回时间)表征传输时延。RTT由单个设备给出,主要测试方法如图12所示。RTT主要在FPGA上测试。FPGA上构建有两个UDP网络栈,UDP1为采集数据发送和接收协议栈,并统计发送一个数据包到接收到一个数据包间的时延。UDP2为UDP环回协议栈,接收来自UDP1的采集数据包并返还到UDP1。UDP2接收数据行为用于模拟实时破裂预测程序读取采集数据这一过程。
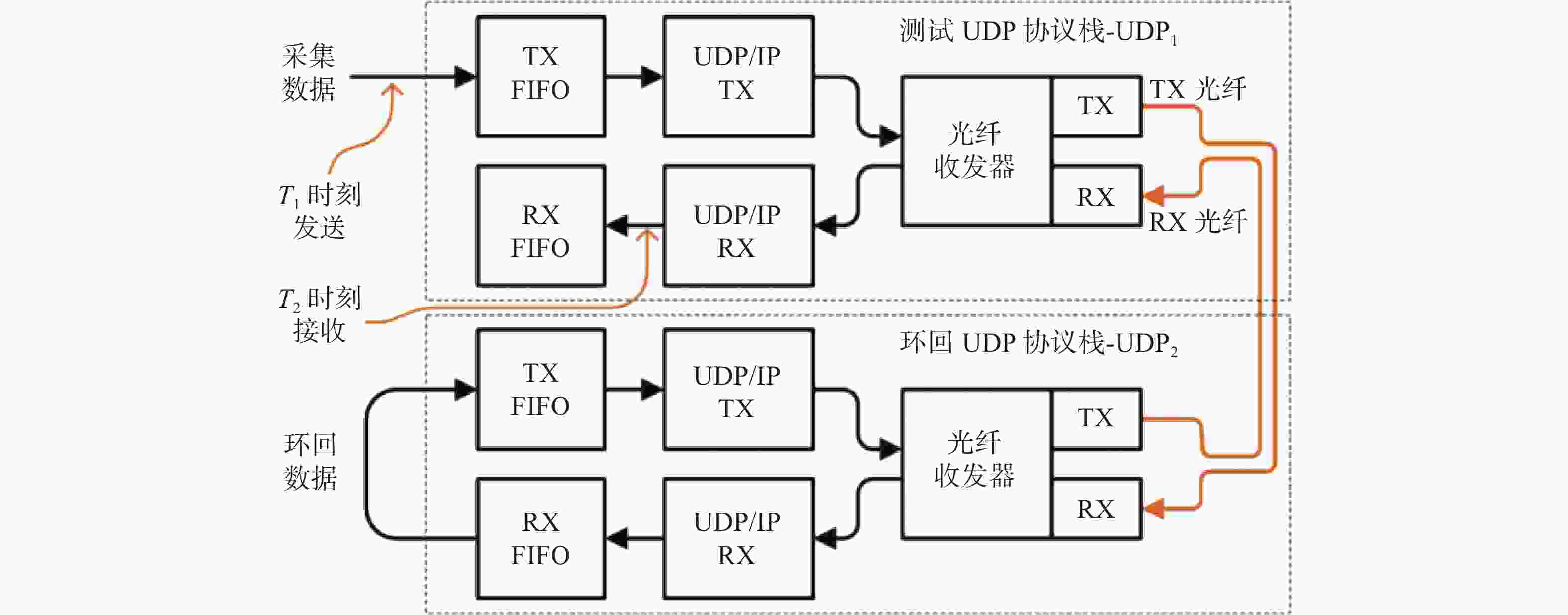
图 12 FPGA上UDP网络的RTT测试方法
Figure 12. Test method of UDP network's RTT on FPGA
测试时,UDP1在T1时刻开始发送一定长度的采集数据,并在T2时刻开始接收来自UDP2返回的数据。FPGA上统计T1与T2两个时刻间的时间差,即为UDP网络的RTT。
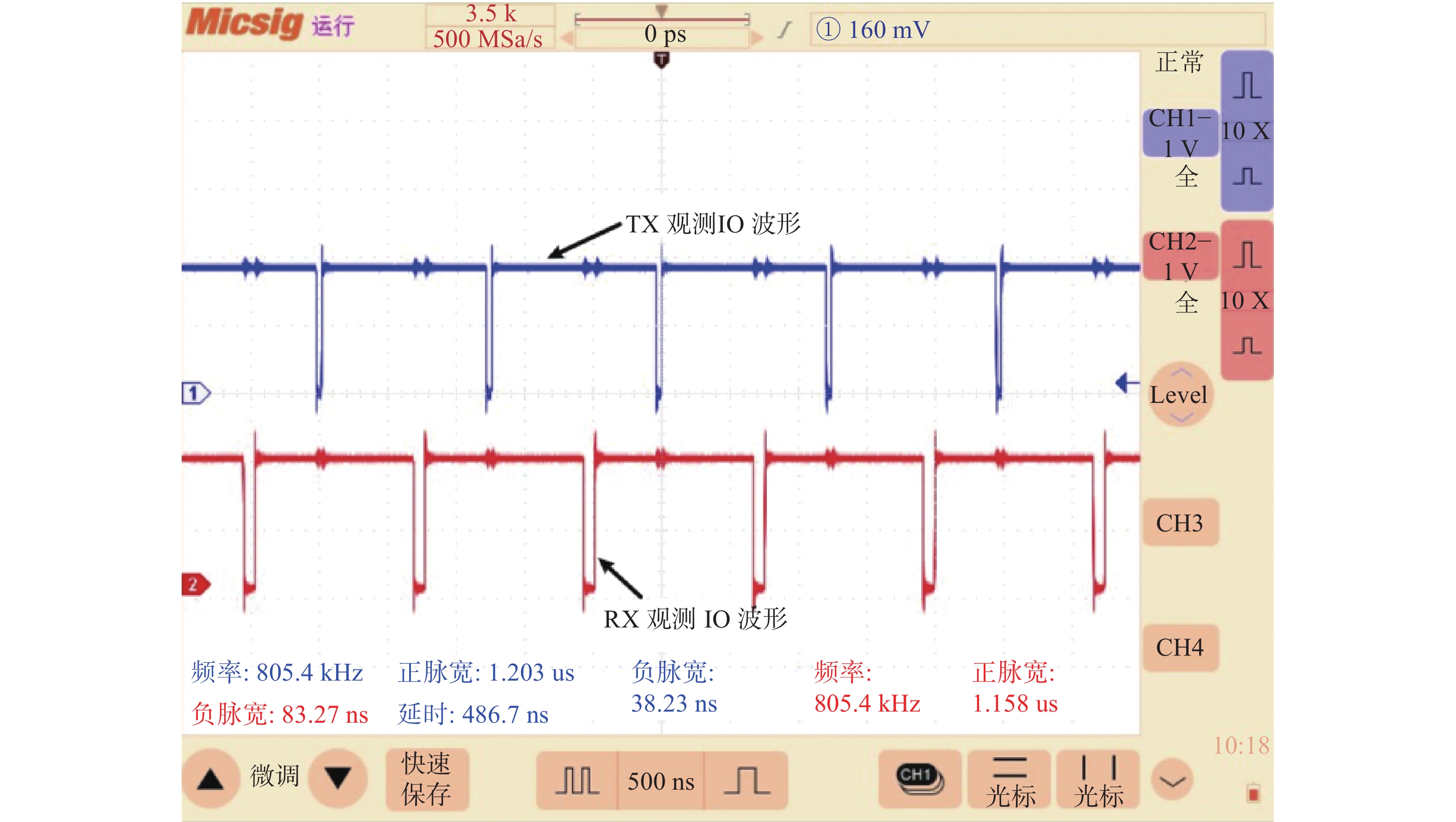
统计T2与T1间的时间差同样基于IO观测法。在UDP1上采用一个IO观测数据包的收发状态,T1时刻IO输出高电平,T2时刻IO输出低电平,则IO高电平时间即为RTT。数据包采用3.4小节中的采样数据包设置,UDP数据部分长度为2 008字节。采用示波器测量IO输出信号的高电平时间,输出采样数据到Matlab,绘制IO上波形图,如图13所示。
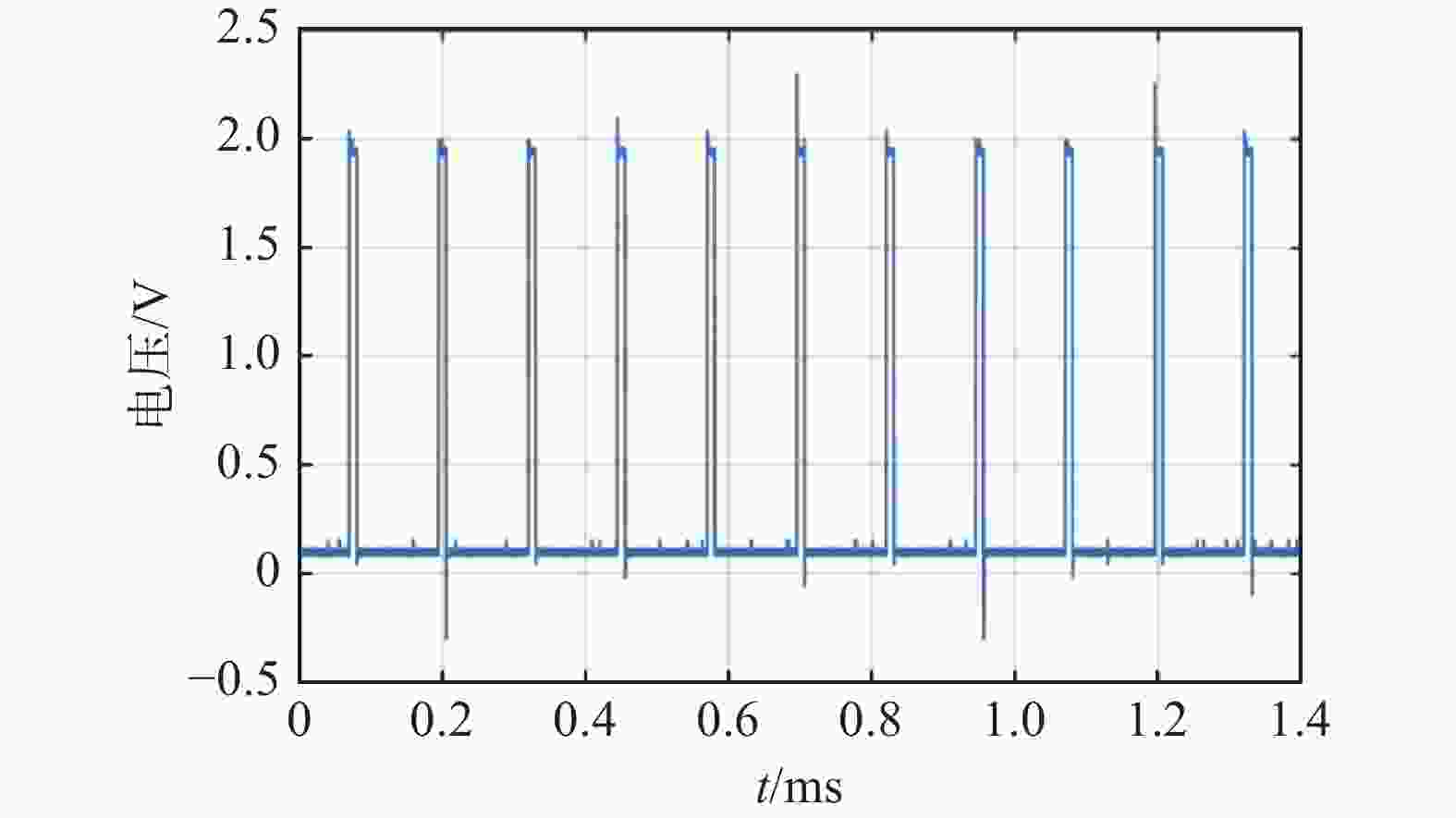
图 13 UDP1观测IO输出波形
Figure 13. Waveform of UDP1 observation IO
IO波形具有11个高电平脉冲,统计得到IO的高电平时间平均值为10.67 μs,则网络RTT时间为10.67 μs。在RTT测试中数据进行一次环回,具有两次发送和一次接收流程。而数据传输时延只统计数据从UDP1开始发送到UDP2接收完成的时间,具有一次发送和一次接收流程,因此一次数据传输的时延约为RTT的2/3,估计此次测试数据传输时延约为7.11 μs,达到预期设计目标。
-
文章根据J-TEXT装置上基于深度学习破裂预测对输入诊断数据的要求,提出了一种实时数据采集系统的设计。该系统基于模块化结构进行设计,分为多通道采集模块、ADC转换控制和数据读取模块、数据分组与封装模块和数据传输网络模块。其中,数据传输网络模块通过构建在FPGA上的10 G UDP以太网传输,可以实现确定性的数据发送行为,使得系统具有很低的数据传输时延。该数据采集系统能够直接与现有的网络设备对接,可以取代专有的网络传输设备,如反射内存。
经过测试,实时数据采集系统支持每通道2 MSa/s采样率,除了可以用于对磁、辐射等诊断信号进行数据采集与实时传输外,还可以对辐射、电子温度等1维诊断进行实时传输,提高数据时间分辨率。系统数据吞吐率可以达到9.3 Gb/s以上,可以提高诊断数据的传输数据量。数据传输时延则小于10 μs,可以减少破裂预测模型获取诊断数据的时间。该实时数据采集系统除了用于为破裂预测模型提供实时诊断数据流外,还可以作为通用数据采集设备应用于J-TEXT装置上,为MDSplus数据库提供实验运行中的诊断数据。
研究的下一步计划是进一步优化实时数据采集系统的测量指标和传输时延指标。采集模块在高电压输入下具有较好的测量精度,但在低电压(小于500 mV)下测量精度下降,需要考虑在模拟前端内加入可变增益环节,保证全电压下均具有较好的测量精度。
数据传输延迟与网络拓扑结构有关,交换机的数据包缓冲操作、网络拥塞、UDP数据包丢失导致的重传等因素同样会导致传输延迟会增加。另外同时使用多个数据采集系统,不同UDP数据包的传输顺序也会影响延迟,需要在J-TEXT装置上探索一种合适且易于实现的网络拓扑结构,以最大限度地减少数据传输延迟。还应探索同时传输多个UDP数据包的方法,以避免其随机影响。
另外为了进一步对实时数据采集系统进行测试,还需要在J-TEXT装置上构建实时数据传输网络,实现实时诊断数据从数据采集系统到实时破裂预测程序的传输。最终实现实时数据采集系统与运行实时破裂预测程序的计算机对接,助力J-TEXT装置上实时破裂预警系统的建设与实现。
-
本研究得到国家重点研发计划(No.2022YFE03040004)和国家自然科学基金(No.12375219)的资助,谨此致谢。
Design of Real-Time Data Acquisition System for Tokamak Disruption Prediction
-
摘要:
目的 等离子破裂是托卡马克核聚变装置运行中的重大威胁。破裂缓解系统可以降低等离子体破裂对装置的危害,其动作时机高度依赖于实时运行的等离子体破裂预测系统对等离子体破裂时刻的预测。基于深度学习的神经网络已被用于训练等离子体破裂预测模型,其实时运行需要来自多种诊断的大量实时数据。 方法 文中提出一种实时数据采集系统的设计方案。该系统基于模块化结构进行设计,分为多通道采集模块、ADC转换控制和数据读取模块、数据分组与封装模块和数据传输网络模块。数据传输网络模块基于运行在FPGA上的10 G速率的硬件UDP网络协议栈进行构建。该硬件UDP协议栈具有确定性的数据传输过程,使得系统具有很低的传输时延。 结果 该实时数据采集系统的采样率可以达到每通道2 MSa/s,数据吞吐速率超过9.3 Gb/s,数据传输延迟小于10 μs。 结论 该实时数据采集系统可以为破裂预测程序提供快速传输的实时诊断数据流。高采样率使得系统可以对辐射、电子温度等1维诊断进行实时传输,提高数据时间分辨率。高数据吞吐率可以提高诊断数据的传输数据量,低数据传输时延可以减少破裂预测模型获取诊断数据的时间。 Abstract:Introduction Plasma disruption poses a significant threat to the tokamak nuclear device during its running and can cause damage to the device. Such damage can be reduced by adopting the disruption mitigation system, which has an action time highly dependent on the real-time running plasma disruption prediction system for predicting the plasma disruption moment. The deep-learning-based neural network has been used to train plasma disruption prediction models, and the real-time running of the deep-learning-based disruption prediction models requires a huge amount of real-time data from multiple diagnostics. Method The article proposed a design scheme for a real-time data acquisition system. The real-time data acquisition and transmission system was designed based on the modular structure and divided into the multiple channels acquisition module, ADC converting control and data reading module, data grouping and packing module and data transmission network module. The data transmission network module was developed on the hardware UDP network stack running on the FPGA at a speed of 10 G. This hardware UDP network stack featured a deterministic data transmission process, enabling a very low transmission latency of the system. Result The real-time data acquisition system has a sampling rate reaching 2 MSa/s, a data throughput rate exceeding 9.3 Gb/s, and a data transmission latency of less than 10 μs. Conclusion This data acquisition system facilitates the fast transmission of diagnostic data streams to disruption prediction models. The high sampling rates enable the system to perform real-time transmission of one-dimensional diagnostics such as radiation and electron temperature, improving the temporal resolution of data. The high data throughput rate can increase the transmission volume of diagnostic data, and the low data transmission latency can reduce the time required for disruption prediction models to obtain diagnostics data. -
Key words:
- tokamak /
- disruption prediction /
- data acquisition /
- UDP /
- real-time transmission
-
图 9 LTC2324 CNV引脚上采样触发信号波形
Fig. 9 Waveform of sampling trigger signal on LTC2324 CNV pin
表 1 基于深度学习的破裂预测模型使用的J-TEXT装置上的部分诊断信号以及采样率
Tab. 1. Part of diagnostic signals on J-TEXT devices used in DL-based disruption prediction models and the sampling rate
使用信号 通道数量/道 J-TXET装置上
采样率/(Sa·s-1)等离子体电流Ip 1 10 k 纵场强度Bt 1 10 k 环电压Vloop 1 10 k 径向位移dr 1 10 k 垂直位移dz 1 10 k 碳III杂质辐射CIII 1 500 k 软X射线SXR 15 500 k 绝对极紫外线辐射AXUV 16 500 k 鞍形线圈exsad 4 250 k 软X射线中心通道SXR_MID 1 500 k Mirnov线圈Mirnov 4 500 k  下载: 导出CSV
下载: 导出CSV
-
[1] 王龙. 磁约束等离子体实验物理 [M]. 北京: 科学出版社, 2018. WANG L. Experimental physics of magnetic confinement plasmas [M]. Beijing: Science Press, 2018. [2] YOKOYAMA T, MIYOSHI Y, HIWATARI R, et al. Prediction of high-beta disruptions in JT-60U based on sparse modeling using exhaustive search [J]. Fusion engineering and design, 2019, 140: 67-80. DOI: 10.1016/j.fusengdes.2019.01.128. [3] YUAN J S, ZUO G Z, ZHAO S B, et al. Design of a shattered pellet injector and preliminary bench tests of Ne pellet formation for EAST disruption mitigation [J]. Fusion engineering and design, 2023, 191: 113567. DOI: 10.1016/j.fusengdes.2023.113567. [4] LANDMAN I S, PESTCHANYI S E, IGITKHANOV Y, et al. Two-dimensional modeling of disruption mitigation by gas injection [J]. Fusion engineering and design, 2011, 86(9/11): 1616-1619. DOI: 10.1016/j.fusengdes.2010.12.017. [5] 李峰. 用于托卡马克等离子体破裂缓解的电磁弹丸注入系统研制 [D]. 武汉: 华中科技大学, 2023. LI F. Development of electromagnetic pellet-injection system for tokamak plasma disruption mitigation [D]. Wuhan: Huazhong University of Science and Technology, 2023. [6] 王雪玲. J-TEXT等离子体破裂预测及逃逸电子束控制的研究 [D]. 武汉: 华中科技大学, 2018. WANG X L. Research of the plasma disruption prediction and runaway electron beams control on J-TEXT [D]. Wuhan: Huazhong University of Science and Technology, 2018. [7] QIU H B, HU Z Z, WU S F, et al. Initial analytical theory of plasma disruption and experimental evidence [J]. Scientific reports, 2023, 13(1): 9551. DOI: 10.1038/s41598-023-36504-7. [8] 吴其其. 基于深度学习异常检测的等离子体破裂预测 [D]. 武汉: 华中科技大学, 2021. DOI: 10.27157/d.cnki.ghzku.2021.001055. WU Q Q. Plasma disruption prediction based on deep learning and anomaly detection [D]. Wuhan: Huazhong University of Science and Technology, 2021. DOI: 10.27157/d.cnki.ghzku.2021.001055. [9] RATTÁ G A, VEGA J, MURARI A, et al. An advanced disruption predictor for JET tested in a simulated real-time environment [J]. Nuclear fusion, 2010, 50(2): 025005. DOI: 10.1088/0029-5515/50/2/025005. [10] ALEDDA R, CANNAS B, FANNI A, et al. Multivariate statistical models for disruption prediction at ASDEX upgrade [J]. Fusion engineering and design, 2013, 88(6/8): 1297-1301. DOI: 10.1016/j.fusengdes.2013.01.103. [11] REA C, MONTES K J, ERICKSON K G, et al. A real-time machine learning-based disruption predictor in DIII-D [J]. Nuclear fusion, 2019, 59(9): 096016. DOI: 10.1088/1741-4326/ab28bf. [12] WANG N C, LIANG Y, DING Y H, et al. Advances in physics and applications of 3D magnetic perturbations on the J-TEXT tokamak [J]. Nuclear fusion, 2022, 62(4): 042016. DOI: 10.1088/1741-4326/ac3aff. [13] 胡斐然. J-TEXT实时破裂预测与避免系统设计与实现 [D]. 武汉: 华中科技大学, 2018. HU F R. The design and implementation of real-time disruption prediction and avoidance system on J-TEXT [D]. Wuhan: Huazhong University of Science and Technology, 2018. [14] 唐畴尧. 基于机器学习的J-TEXT实时等离子体破裂预测及非磁位移测量技术研究 [D]. 武汉: 华中科技大学, 2022. DOI: 10.27157/d.cnki.ghzku.2022.001349. TANG C Y. Technology research on J-TEXT real-time plasma disruption prediction and non-magnetic displacement measurement based on machine learning [D]. Wuhan: Huazhong University of Science and Technology, 2022. DOI: 10.27157/d.cnki.ghzku.2022.001349. [15] KATES-HARBECK J, SVYATKOVSKIY A, TANG W. Predicting disruptive instabilities in controlled fusion plasmas through deep learning [J]. Nature, 2019, 568(7753): 526-531. DOI: 10.1038/s41586-019-1116-4. [16] ZHU J X, REA C, MONTES K, et al. Hybrid deep-learning architecture for general disruption prediction across multiple tokamaks [J]. Nuclear fusion, 2021, 61(2): 026007. DOI: 10.1088/1741-4326/abc664. [17] TANG W, DONG G, BARR J, et al. Implementation of AI/DEEP learning disruption predictor into a plasma control system [J]. Contributions to plasma physics, 2023, 63(5/6): e202200095. DOI: 10.1002/ctpp.202200095. [18] BELLIZIO T, DE TOMMASI G, RISOLI N, et al. A MARTe based simulator for the JET vertical stabilization system [J]. Fusion engineering and design, 2011, 86(6/8): 1026-1029. DOI: 10.1016/j.fusengdes.2011.02.076. [19] ZHANG M, ZHENG G Z, ZHENG W, et al. JRTF: a flexible software framework for real-time control in magnetic confinement nuclear fusion experiments [J]. IEEE transactions on nuclear science, 2016, 63(2): 1070-1075. DOI: 10.1109/TNS.2016.2518709. [20] LIU G M, MAKIJARVI P, PONS N. The ITER CODAC network design [J]. Fusion engineering and design, 2018, 130: 6-10. DOI: 10.1016/j.fusengdes.2018.02.072. [21] LU T C, YUAN Q P, ZHANG R R, et al. Research on transparent access method for multiple types of data acquisition device in EAST PCS [J]. Fusion engineering and design, 2022, 179: 113135. DOI: 10.1016/j.fusengdes.2022.113135. [22] KADZIELA M, JABLONSKI B, PEREK P, et al. Evaluation of the ITER real-time framework for data acquisition and processing from pulsed gigasample digitizers [J]. Journal of fusion energy, 2020, 39(5): 261-269. DOI: 10.1007/s10894-020-00264-3. [23] BONCAGNI L, CENTIOLI C, IANNONE F, et al. Synchronous databus network in ITER: open source real-time network for the next nuclear fusion experiment [J]. Fusion engineering and design, 2008, 83(2/3): 504-510. DOI: 10.1016/j.fusengdes.2007.10.007. [24] XIAO B J, HUMPHREYS D A, WALKER M L, et al. EAST plasma control system [J]. Fusion engineering and design, 2008, 83(2/3): 181-187. DOI: 10.1016/j.fusengdes.2007.12.028. [25] KWON G, LEE W, BERTRAND B, et al. Development of real-time network translator between ITER synchronous data bus network and reflective memory [J]. Fusion engineering and design, 2017, 123: 955-959. DOI: 10.1016/j.fusengdes.2017.03.024. [26] ZHENG W, LIU Q, ZHANG M, et al. J-TEXT distributed data storage and management system [J]. Fusion engineering and design, 2018, 129: 207-213. DOI: 10.1016/j.fusengdes.2018.02.058. [27] ZHENG W, XUE F M, CHEN Z Y, et al. Disruption prediction for future tokamaks using parameter-based transfer learning [J]. Communications physics, 2023, 6(1): 181. DOI: 10.1038/s42005-023-01296-9. [28] GUO D J, HU Q M, LI D, et al. Upgrade of the Mirnov probe arrays on the J-TEXT tokamak [J]. Review of scientific instruments, 2017, 88(12): 123502. DOI: 10.1063/1.4996360. [29] GUO D J, HU Q M, LI D, et al. Development of the saddle loop sensors on the J-TEXT tokamak [J]. AIP Advances, 2017, 7(10): 105002. DOI: 10.1063/1.4993480. [30] DING Y H, ZHUANG G, ZHANG X Q, et al. Soft X-ray imaging diagnostic system on the J-TEXT tokamak [J]. Nuclear instruments and methods in physics research section A: accelerators, spectrometers, detectors and associated equipment, 2009, 606(3): 743-748. DOI: 10.1016/j.nima.2009.05.012. [31] ZHANG X L, CHENG Z F, LIN X D, et al. Spectral diagnostic system for light impurity transport study in J-TEXT tokamak [J]. Fusion engineering and design, 2019, 147: 111241. DOI: 10.1016/j.fusengdes.2019.111241. [32] ZHANG X L, CHENG Z F, HOU S Y, et al. Upgrade of absolute extreme ultraviolet diagnostic on J-TEXT [J]. Review of scientific instruments, 2014, 85(11): 11E420. DOI: 10.1063/1.4891159. [33] ZHENG W, HU F R, ZHANG M, et al. Profile aided real-time plasma electron density feedback control based on FPGA on J-TEXT [J]. IEEE transactions on nuclear science, 2018, 65(2): 771-776. DOI: 10.1109/TNS.2017.2782788. [34] YANG Z Y, XIA F, SONG X M, et al. Real-time disruption prediction in the plasma control system of HL-2A based on deep learning [J]. Fusion engineering and design, 2022, 182: 113223. DOI: 10.1016/j.fusengdes.2022.113223. -

 点击查看大图
点击查看大图
图(13) / 表 (1)
计量
- 文章访问数: 738
- HTML全文浏览量: 68
- PDF下载量: 26
- 被引次数: 0
