




-
分布式电源是指分布在用户端的发电设备,通过在本地生成和利用能源来满足用电需求,从而减少能源传输损失和碳排放量。分布式电源的大量接入,不仅使传统配电网的拓扑结构发生改变,而且使配网侧负荷组成及出力特性更加复杂[1-3]。基于静态负荷和感应电动机负荷的模型虽能较好地对传统配电网络的负荷特性进行描述,但随着分布式电源广泛接入,已难以准确表征配电网的负荷特性[4]。
典型分布式电源有光伏发电系统(Photovoltaic,PV),燃料电池发电(Fuel Cell,FC),微型燃气轮机发电系统(Micro-Turbine Generation,MTG)。现有文献针对含典型分布式电源的负荷模型展开了大量研究,主要可分为以下几类:如文献[5-6]基于微型燃气轮机与电力电子装置工作原理分别对MTG进行了整体建模,且均通过仿真验证,表明其模型能够较好地反映实际MTG的动态特性。Gholami在文献[7]中提出了一种快速精确的二极管模型,该模型能够较好描述可变环境条件下光伏面板的电气行为。文献[8]基于Matlab/Simulink搭建了PV并网仿真平台,提出一种等效模型。最后测试模型在不同扰动强度下性能表现,检验了所提出的等效模型的具有良好的泛化能力。文献[9]基于PSCAD/EMTDC建立了含分布式储能的光伏发电系统仿真模型。文献[10]建立了一种固体氧化物燃料电池(Solid Oxide FC,SOFC)电堆电特性的电耦合模型并设计出一种改进的遗传算法对其进行参数辨识。文献[11]基于基于团聚体模型的三维模拟,研究了不同参数对燃料电池输出功率的影响。在优化参数的情况下,提高了电池的电流密度。文献[12]提出了燃料电池的2阶动态微分方程的等效描述模型。最终通过仿真验证了该等效描述模型的有效性、泛化能力和参数的稳定性。上述文献在对含某一特定的分布式电源的负荷模型的研究已经较为完善,且均通过仿真验证其所提模型的有效性。但目前少有文献对不同类型分布式电源进行归纳分析,缺乏较通用的模型方便相关人员对逆变型DG模型的研究分析。
文章对含典型分布式电源的负荷模型进行深入研究,基于对逆变并网型DG拓扑结构及动态行为的综合分析,搭建了一种含DG的综合负荷模型。采用计算机模拟方法,对模型的参数进行灵敏度分析,探究其对模型精度的影响以确定关键参数;然后采用白鲨优化算法对模型参数进行辨识,最后在一定电压跌落程度情况下,对模型的自描述能力进行了分析验证。
-
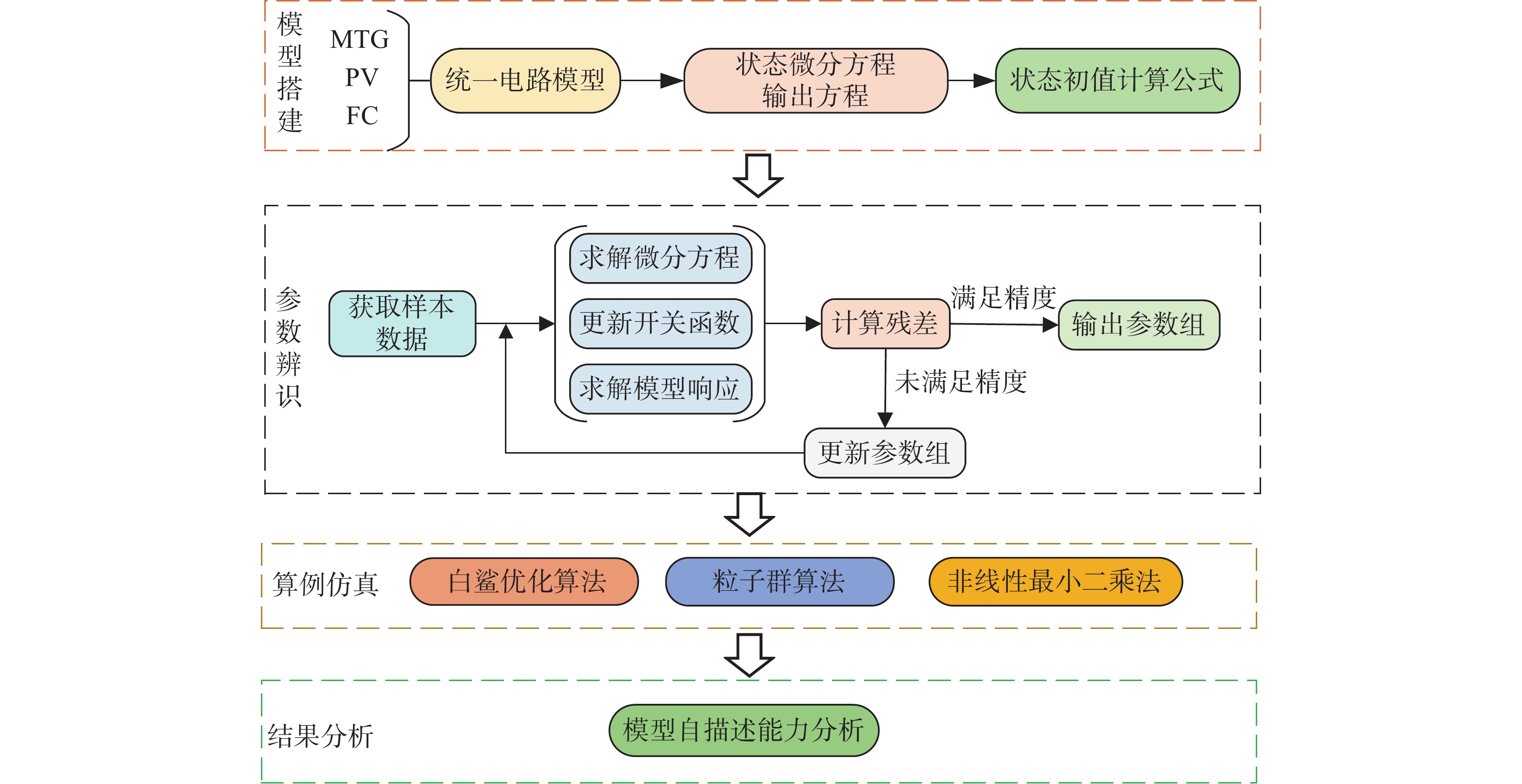
通过对MTG、PV及FC系统进行定性分析,将其相似结构进行统一,得到IIDG统一模型等值电路。通过对搭建的统一模型进行分析计算,推导得到逆变型分布式电源系统的状态微分方程,系统模型的输出方程。为通过连续迭代和开关函数更新计算系统各时刻的状态和响应,给出系统的状态初值的计算公式。对所搭建的统一模型进行梳理,结合样本数据,给出统一模型辨识流程。最后采用不同的辨识算法来对逆变型DG的主导参数进行辨识。含IIDG的负荷模型构建的原理如图1所示。
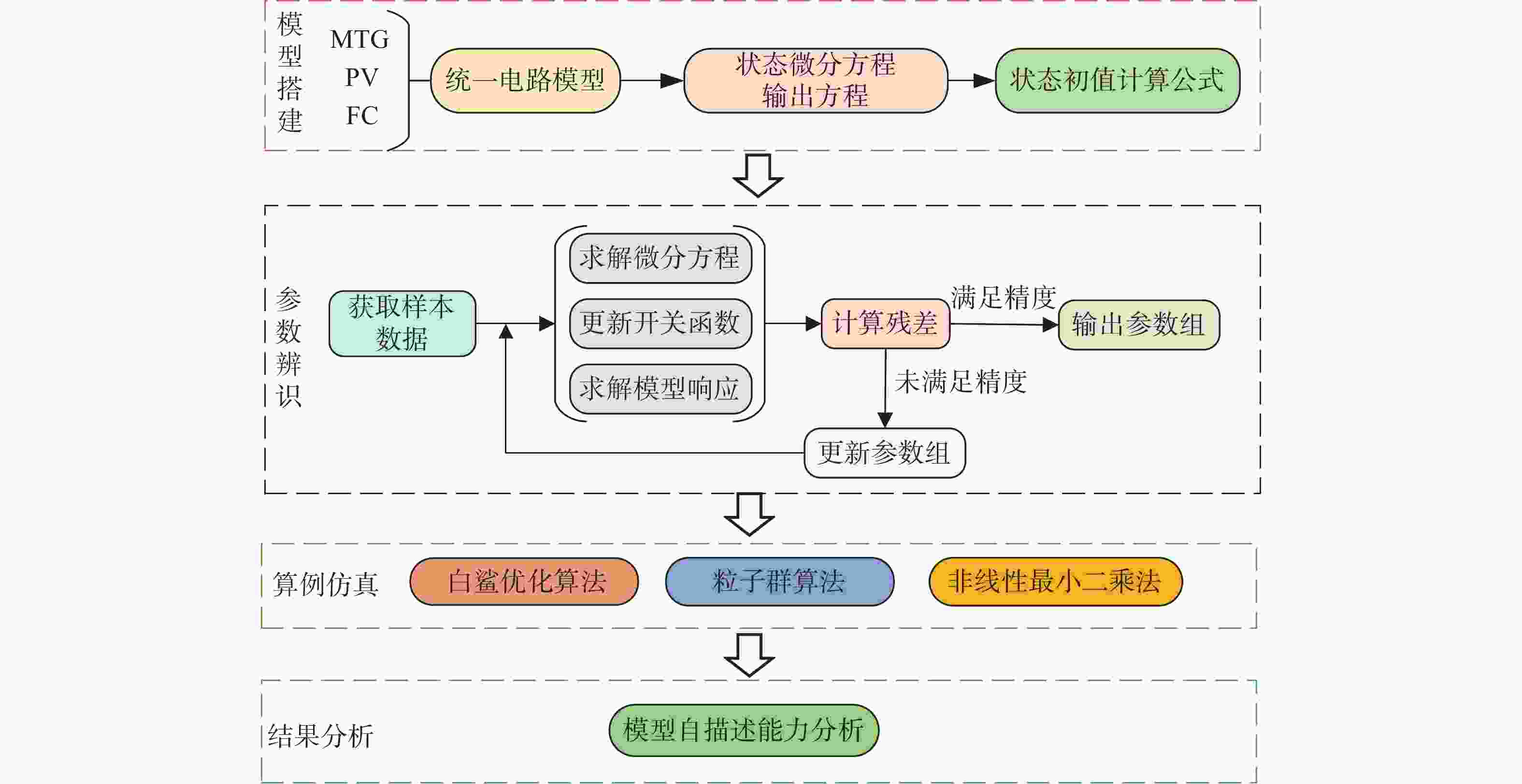
图 1 含逆变型分布式电源的负荷模型构建的原理图
Figure 1. Construction schematic diagram of the load model of IIDG
-
不同类型的IIDG在拓扑结构上具有一定的相似性,这为搭建IIDG统一模型提供了一定的理论基础。在逆变式并联式分布式电源中,燃料电池与光伏电池为直流电源,须与逆变器联接[13-14];在MTG中,通常使用高速永磁同步发电机来产生三相高频电[15],因此需要增加1个整流器外接1个逆变装置,把三相高频电转换成交流电后进行并网。三者结构较为相似:对于MTG而言,若将燃气涡轮,压缩机高速永磁同步风力发电机及整流器当成一个整体,那么这3类逆变的DG就可以得到一个统一的拓扑[16]。
-
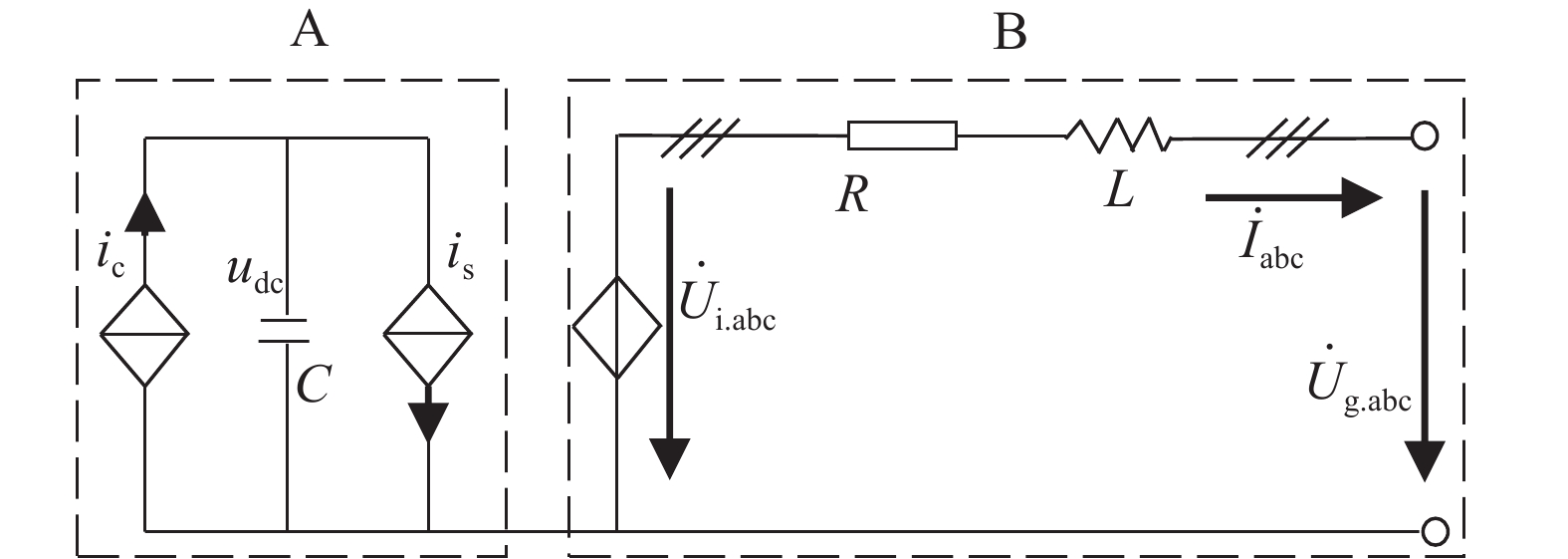
基于对IIDG特性分析,构建了由等值电感$ C $,电阻$ R $,电感$ L $、受控电压源$ {\dot U_{{\mathrm{i}}.\mathrm{abc}}} $等电气元件组成的IIDG的等值电路,具体结构如图2所示。
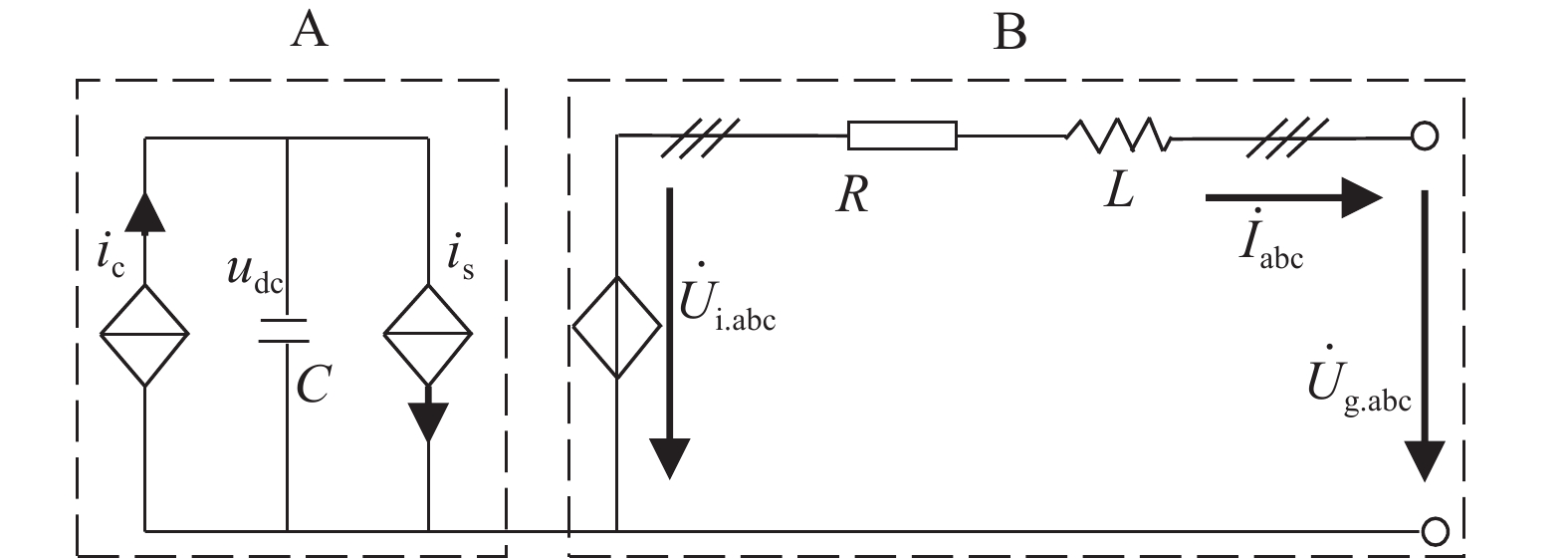
图 2 IIDG统一模型等值电路
Figure 2. Equivalent circuit of the unified model for IIDG
图2中:
$ {i_{\mathrm{c}}} $ ——注入电流(A),对PV,SOFC来说分别是PV板、SOFC堆输出的直流电流,对于MTG则是整流后的电流;
$ C $ ——直流稳压电容(F);
$ {u_{{\mathrm{dc}}}} $ ——直流稳压电容上的电压(V);
$ {i_{\mathrm{s}}} $ ——逆变器侧的注入电流(A);
$ L $ ——与之串联的等值电感(H);
$ {\dot I_{{\mathrm{abc}\;}}} $ ——注入电网电流向量(A);
$ R $ ——逆变器与公共连接点(Point of Common Coupling,PCC)之间的等值电阻($ \Omega $);
$ {\dot U_{{\mathrm{g}}.{\mathrm{abc}}\;}} $——网侧电压向量(V);
$ {\dot U_{{\mathrm{i}}.{\mathrm{abc}}}\;} $——出口侧电压向量(V)。
$ {\dot U_{{\mathrm{i}}.{\mathrm{abc}}}} $的幅值和相位与$ {u_{{\mathrm{dc}}}} $以及开关函数$ S $有关。$ {\dot U_{{\mathrm{i}}.{\mathrm{abc}}}} $与$ {i_{\mathrm{c}}} $的表达式可见式(1)。
$$ \left\{ {\begin{array}{*{20}{l}} {{{\dot U}_{{\text{i}}.{\text{abc}}}} = \dot S{u_{{\text{dc}}}}} \\ {{i_{\mathrm{c}}} = \dfrac{{{P_{\text{s}}}}}{{{u_{{\text{dc}}}}}}} \end{array}} \right. $$ (1) 式中:
$ {P_{\mathrm{s}}} $ ——输入功率(W)。
为了方便后续的简化分析[17],将式(1)进行Park变换,如式(2)所示。
$$ \left\{ {\begin{array}{*{20}{l}} {\dot S = {S_d} + j{S_q}} \\ {{U_{{\text{i}},d}} = {S_d}{u_{{\text{dc}}}}} \\ {{U_{{\text{i}},q}} = {S_q}{u_{{\text{dc}}}}} \\ {{{\dot U}_{{\text{i}},dq}} = {U_{{\text{i}},d}} + j{U_{{\text{i}},q}}} \end{array}} \right. $$ (2) 式中:
$ {U_{{\mathrm{i}},dq}} $ ——$ {\dot U_{{\mathrm{i}}.{\mathrm{abc}}}} $在对应$ d\text{-}q $坐标系下的合成矢量(V);
$ {S_d} $ ——$ S $在$ d\text{-}q $坐标系下的d轴分量;
$ {S_q} $ ——$ S $在$ d\text{-}q $坐标系下的q轴分量。
-
在图2所搭建的统一模型等值电路模型中,以系统输入电流、直流稳压电容电压作为系统模型的状态向量$ {\boldsymbol{x}} $,以公共连接点电压的三相瞬时值作为模型和输入(控制激励)向量$ {\boldsymbol{u}} $。综上,可得该逆变并网型DG状态方程的一般形式,如式(3)所示。
$$ \left\{ {\begin{array}{*{20}{l}} {\dfrac{{{\mathrm{d}}{\boldsymbol{x}}}}{{{\mathrm{d}}t}} = f({\boldsymbol{x}},\:{\boldsymbol{\theta}} ,\:{\boldsymbol{u}})} \\ {y = h({\boldsymbol{x}},{\boldsymbol{\theta}} ,{\boldsymbol{u}})} \end{array}} \right. $$ (3) 式中:$ {\boldsymbol{x}} = {\left[ {{i_{\mathrm{a}}},{i_{\mathrm{b}}},{i_{\mathrm{c}}},{u_{{\mathrm{dc}}}}} \right]^{\mathrm{T}}} $,$ y = P $,$ {\boldsymbol{u}} = {\left[ {{u_{g.a}},{u_{g.b}},{u_{g.c}}} \right]^{\mathrm{T}}} $;在系统中,令模型参数向量组$ {\boldsymbol{\theta}} = [{\theta _1},{\theta _2}] $,$ {\theta _1} = {\left[ {C{\text{ }}R{\text{ }}L} \right]^{\mathrm{T}}} $,$ {\theta _2} = \left[ {{k_{p1}},{k_{i1}},{k_{p2}},{k_{i2}}} \right] $。式(3)分别为逆变型分布式电源系统的状态微分,系统模型的输出方程。由上式可知,所搭建的模型系统为非线性系统。上式中一式状态微分方程可由基本电路知识求得,具体表达如式(4)。
$$ \left\{ {\begin{array}{*{20}{l}} {\dfrac{{{\mathrm{d}}{i_{{\text{abc}}}}}}{{{\mathrm{d}}t}} = \dfrac{1}{L}\left( {{u_{{\text{i}}.{\text{abc}}}} - {u_{{\text{g}}.{\text{abc}}}} - {i_{{\text{abc}}}}R} \right)} \\ {\dfrac{{{\mathrm{d}}{u_{{\text{dc}}}}}}{{{\mathrm{d}}t}} = \dfrac{1}{C}\left( {{i_c} - {S_{\text{a}}}{i_{\text{a}}} - {S_{\text{b}}}{i_{\text{b}}} - {S_{\text{c}}}{i_{\text{c}}}} \right)} \end{array}} \right. $$ (4) 式中:
$ {i_{{\mathrm{abc}}\;}} $ ——$ \Omega $的瞬时值(A);
$ {u_{{\mathrm{i}}.{\mathrm{abc}}\;}} $ ——$ {\dot U_{{\mathrm{i}}.{\mathrm{abc}}}} $的瞬时值(V);
$ {u_{{\mathrm{g}}.{\mathrm{abc}}}} $ ——$ {\dot U_{{\mathrm{g}}.{\mathrm{abc}}}} $的瞬时值(V);
$ {S}_{{\mathrm{a}}}、{S}_{{\mathrm{b}}}、{S}_{{\mathrm{c}}} $ ——三相桥开关函数;
$ {i}_{{\mathrm{a}}}、{i}_{{\mathrm{b}}}、{i}_{{\mathrm{c}}} $ ——逆变器侧的三相电流(A)。
为了方便简化分析,对其进行Park变换。以PCC电流的$ d\text{-}q $轴分量$ {I}_{d}、{I}_{q} $和$ {u_{{\mathrm{dc}}}} $为状态变量,系统动态方程与输出方程分别如式(5)~式(6)所示:
$$ \left\{ {\begin{array}{*{20}{l}} {\dfrac{{{\mathrm{d}}{I_d}}}{{{\mathrm{d}}t}} = \dfrac{1}{L}\left( {{U_{{\text{i}}.d}} - {U_{{\text{g}}.d}} - {I_d}R} \right) + \omega {I_q}} \\ {\dfrac{{{\mathrm{d}}{I_q}}}{{{\mathrm{d}}t}} = \dfrac{1}{L}\left( {{U_{{\text{i}}.q}} - {U_{{\text{g}}.q}} - {I_q}R} \right) - \omega {I_d}} \\ {\dfrac{{{\mathrm{d}}{u_{{\text{dc}}}}}}{{{\mathrm{d}}t}} = \dfrac{1}{C}\left( {\dfrac{{{P_{\text{s}}}}}{{{u_{{\text{dc}}}}}} - \left( {{S_d}{I_d} - {S_q}{I_q}} \right)} \right)} \end{array}} \right. $$ (5) $$ \left\{ {\begin{array}{*{20}{l}} {P = {U_{{\text{g}}.d}}{I_q} + {U_{{\text{g}}.d}}{I_q}} \\ {Q = Uq{I_d} - {U_{{\text{g}}.d}}{I_q}} \end{array}} \right. $$ (6) 式中:
$ {U_{{\mathrm{g}}.d}} $ ——$ {\dot U_{{\mathrm{g}}.{\mathrm{abc}}}} $在$ d\text{-}q $坐标系下d轴分量(V);
$ {U_{{\mathrm{g}}.q}} $ ——$ {\dot U_{{\mathrm{g}}.{\mathrm{abc}}}} $在$ d\text{-}q $坐标系下q轴分量(V);
$ \omega $ ——系统的角速度(rad/s)。
-
式(5)给出了系统模型状态的微分方程,为通过连续迭代和开关函数更新计算系统各时刻的状态和响应,有必要计算系统的状态初值,具体计算过程如下:所搭建的逆变型DG系统的模型初始输入激励$ {u_{{\mathrm{g}}0}} = {\left[ {{U_{{\mathrm{g}}.x0}},{U_{{\mathrm{g}}.y0}}} \right]^{\mathrm{T}}} $与初始响应$ {y_0} = {\left[ {{P_0},{Q_0}} \right]^{\mathrm{T}}} $是已知的,系统状态电流初始响应$ {I_0} = {\left[ {{I_{x0}},{I_{y0}}} \right]^{\mathrm{T}}} $可由式(7)求得,由$ d\text{-}q $与$ x\text{-}y $坐标系之间的状态转移矩阵易得电流状态初值$ {I_0} = {\left[ {{I_{d0}},{I_{q0}}} \right]^{\mathrm{T}}} $。由于系统刚开始运行,此时DG并网母线电压向量相为0。
$$ \left\{ {\begin{split}& {{I_{x0}} = \dfrac{{{P_0}{U_{{\text{g}} \cdot x0}} + {Q_0}{U_{{\text{g}} \cdot y0}}}}{{U_{{\text{g}} \cdot x0}^2 + U_{{\text{g}} \cdot y0}^2}}} \\& {{I_{y0}} = \dfrac{{{P_0}{U_{{\text{g}} \cdot y0}} - {Q_0}{U_{{\text{g}} \cdot x0}}}}{{U_{{\text{g}} \cdot x0}^2 + U_{{\text{g}} \cdot y0}^2}}} \end{split}} \right. $$ (7) 由式(5)可知,当系统初始运行时,$ \dfrac{{{\mathrm{d}}{I_d}}}{{{\mathrm{d}}t}} $及$ \dfrac{{{\mathrm{d}}{I_q}}}{{{\mathrm{d}}t}} $为0,因此可求得逆变器出口侧电压初值$ {U_{{\mathrm{i}}0}} = {\left[ {{U_{{\mathrm{i}}.d0}},{U_{{\mathrm{i}}.q0}}} \right]^{\mathrm{T}}} $,如式(8)。
$$ \left\{ {\begin{split}& {{U_{{\text{i}}.d0}} = {U_{{\text{g}}d0}} + R{I_{d0}} - \omega L{I_{q0}}} \\ & {{U_{{\text{i}}.q0}} = {U_{{\text{g}}q0}} + R{I_{q0}} + \omega L{I_{d0}}} \end{split}} \right. $$ (8) 假设逆变器功率损耗较小,可将其忽略不计,则根据功率守恒定律可知,$ {P_{\mathrm{s}}} $应等于出口侧输出功率,如式(9)所示。
$$ {P_{\mathrm{s}}} = {U_{{\text{i}}{\text{.}}d0}}{I_{d0}} + {U_{{\text{i}}{\text{.}}q0}}{I_{q0}}\: $$ (9) 结合式(2)可知:
$$ \left\{ {\begin{split}& {{S_d} = {U_{{\text{i}}{{.d}}}}/{U_{{\text{dc}}}}} \\ & {{S_q} = {U_{{\text{i}}{{.q}}}}/{U_{{\text{dc}}}}} \end{split}} \right. $$ (10) 在此以$ {S_d} $初值$ {S_{d0}} $为基准,如式(10)所示,将$ {S}_{d}、{S}_{q} $进行标幺化处理,得到其标幺值$ {S}_{q}^{*}、{S}_{d}^{*} $。
$$ \left\{ {\begin{split}& {S_d^* = {S_d}/{S_{d0}}} \\ & {S_q^* = {U_{{\text{i}}.q}}/{U_{{\text{i}}.d0}}} \end{split}} \right. $$ (11) 由式(11)可得:
$$ \left\{ {\begin{split}& {S_{d0}^* = 1} \\ & {S_{q0}^* = {U_{{\text{i}}.q0}}/{U_{{\text{i}}.d0}}} \end{split}} \right. $$ (12) 由式(2)和式(12)可得$ {u_{{\mathrm{dc}}}} $的等效标幺值$ u_{{\mathrm{dc}}0}^* $、注入逆变器的等效标幺值电流$ i_{s0}^* $:
$$ \left\{ {\begin{split}& {i_{{\text{s}}0}^* = i_{{\text{c}}0}^* = S_{d0}^*{i_{d0}} + S_{q0}^*{i_{q0}}} \\ & {u_{{\text{dc}}0}^* = {P_{\text{s}}}/i_{{\text{s}}0}^*} \end{split}} \right. $$ (13) 在系统的初始时刻,直流稳压电压与设定值$ u_{{\mathrm{dc}}.{\mathrm{ref}}}^* $应当一致,而电流参考值$ I_{d.{\mathrm{ref}}0}^* $与$ I_{q.{\mathrm{ref}}0}^* $应分别等于电流的初始值,如式(14)所示。
$$ \left\{ {\begin{split}& {{I_{d.{\text{ref}}\:0}} = {I_{d\:0}}} \\ & {{I_{q.{\text{ref}}\:0}} = {I_{q\:0}}} \\ & {u_{{\mathrm{dc}}.{\text{ref}}}^* = u_{{\text{dec0}}}^*} \end{split}} \right. $$ (14) 经过上述一系列变换,该系统的状态微分方程(5)可以改写成式(15):
$$ \left\{ {\begin{split}& {\dfrac{{{\mathrm{d}}{I_d}}}{{{\mathrm{d}}t}} = \dfrac{1}{L}({U_{{\text{i}},d}} - {U_{{\text{g}},d}} - {I_d}R) + \omega {I_q}} \\& {\dfrac{{{\mathrm{d}}{I_q}}}{{{\mathrm{d}}t}} = \dfrac{1}{L}({U_{{\text{i}},q}} - {U_{{\text{g}},q}} - {I_q}R) - \omega {I_d}} \\& {\dfrac{{{\mathrm{d}}{u_{{\text{dc}}}}}}{{{\mathrm{d}}t}} = \dfrac{1}{C}\left( {\dfrac{{{P_s}}}{{{u_{{\mathrm{dc}}}}}} - (S_q^*{I_d} + S_{{q}}^*{I_q})} \right)} \end{split}} \right. $$ (15) 此时,求解状态微分方程(14)所需要的初始值均已求出。要注意的是在后续参数辨识的过程中,电流的参考值$ {I_{d.{\mathrm{ref}}}} $及开关函数$ S_q^* $,$ S_d^* $均需根据系统状态进行实时动态修正,式(16)中,$ {k}_{{\mathrm{p}}1}、{k}_{{\mathrm{i}}1} $为电压控制参数,而$ {k}_{{\mathrm{p}}2}、{k}_{{\mathrm{i}}2} $则为电流控制参数。由于参数辨识需要基于计算机仿真实现,因此需将上式(15)进行离散化处理,如式(17)所示。
$$ \left\{ {\begin{split}& {{I_{d.{\text{ref}}}} = ({k_{{\text{pl}}}} + \int {{k_{{\text{i1}}}}} {\mathrm{d}}t)(u_{{\text{dc}}}^* - u_{{\text{dc}}{\text{.ref}}}^*)} \\ & {S_d^* = ({k_{{\text{p2}}}} + \int {{k_{12}}} {\mathrm{d}}t)({I_{d.{\text{ref}}}} - {I_d})} \\ & {S_q^* = ({k_{{\text{p2}}}} + \int {{k_{12}}} {\mathrm{d}}t)({I_{q.{\text{ref}}}} - {I_q})} \end{split}} \right. $$ (16) $$ \left\{ {\begin{split}& {{I_{d\:{\text{def}}\:k}} = {I_{d\:{\text{new}}\:k - 1}} + ({k_{{\text{pl}}\:1}} + {k_{11}}\Delta t) \times \Delta u_{{\text{def}}\:k}^* - {k_{{\text{pl}}\:1}}\Delta u_{{\text{dc}}\:k - 1}^*} \\ & {S_{d\:k}^* = S_{d\:k - 1}^* + ({k_{{\text{pl}}\:2}} + {k_{12}}\Delta t) \times \Delta {I_{d\:k}} - {k_{{\text{pl}}\:2}}\Delta {I_{d\:k - 1}}} \\ & {S_{q\:k}^* = S_{q\:k - 1}^* + ({k_{{\text{pl}}\:2}} + {k_{12}}\Delta t) \times \Delta {I_{q\:k}} - {k_{\:2}}\Delta {I_{q\:k - 1}}} \end{split}} \right. $$ (17) 式中:
$ k $ ——离散化后得到的时间索引;
$ \Delta t $ ——计算机采样时间间隔(s);
$ S_{d.k}^* $、$ S_{q.k}^* $ ——$ k $时刻S的d轴和q轴分量。
$ \Delta u_{{\mathrm{dc}}.k}^* $、$ \Delta I_{d.k}^* $、$ \Delta I_{q.k}^* $如下式(18)所示,分别为第$ k $时刻相应变量离散偏差。
$$ \left\{ {\begin{split}& {\Delta u_{{\text{dc}}{\text{.}}k}^* = \Delta u_{{\text{dc}}{\text{.}}k}^* - \Delta u_{{\text{dc}}{\text{.ref}}{\text{.}}k}^*} \\ & {\Delta {I_{d.k}} = {I_{d.k}} - {I_{d.{\text{ref}}{\text{.}}k}}} \\ & {\Delta {I_{q.k}} = {I_{q.k}} - {I_{q.{\text{ref}}{\text{.}}k}}} \end{split}} \right. $$ (18) 至此完成了IIDG统一模型搭建。系统描述为式(3),在给定一组参数,施加一定的输入激励下,以初始激励求得系统状态初值以及开关函数。已第$ k $时刻的系统状态,结合主导辨识参数,不断去迭代求得第$ k + 1 $时刻的状态,求得当下系统响应$ {y_k} $并再每一次迭代后对开关函数进行更新。重复以上步骤,即可得到完整的系统响应。下面给出具体的参数辨识流程。
-
在确定模型类型结构后,主导参数及参数辨识算法的选取直接影响着模型的好坏。灵敏度分析作为一种相对评估方法,可以帮助识别主导参数。如公式(19)所示,灵敏度是指当系统的相关参数发生微小扰动时,系统的动态变换幅度。在主导参数辨识过程中,优化算法的选取对参数辨识精度和速度有着重要的影响。常用的优化算法有Mini-batch梯度下降、最小二乘法、遗传算法、梯度下降法,粒子群算法、蚁群算法、白鲨优化算法等[18-21]。
$$ {S_\theta } = \dfrac{{\Delta y/y}}{{\Delta \theta /\theta }} = \dfrac{{{\mathrm{d}}y}}{{{\mathrm{d}}\theta }} \cdot \dfrac{\theta }{y} $$ (19) -
根据式(5)~式(6)搭建IIDG模型,根据式(7)~式(14)确定模型初值。初始化待辨识组,采取优化算法对其进行辨识,具体如下,完整的辨识流程如图3所示。
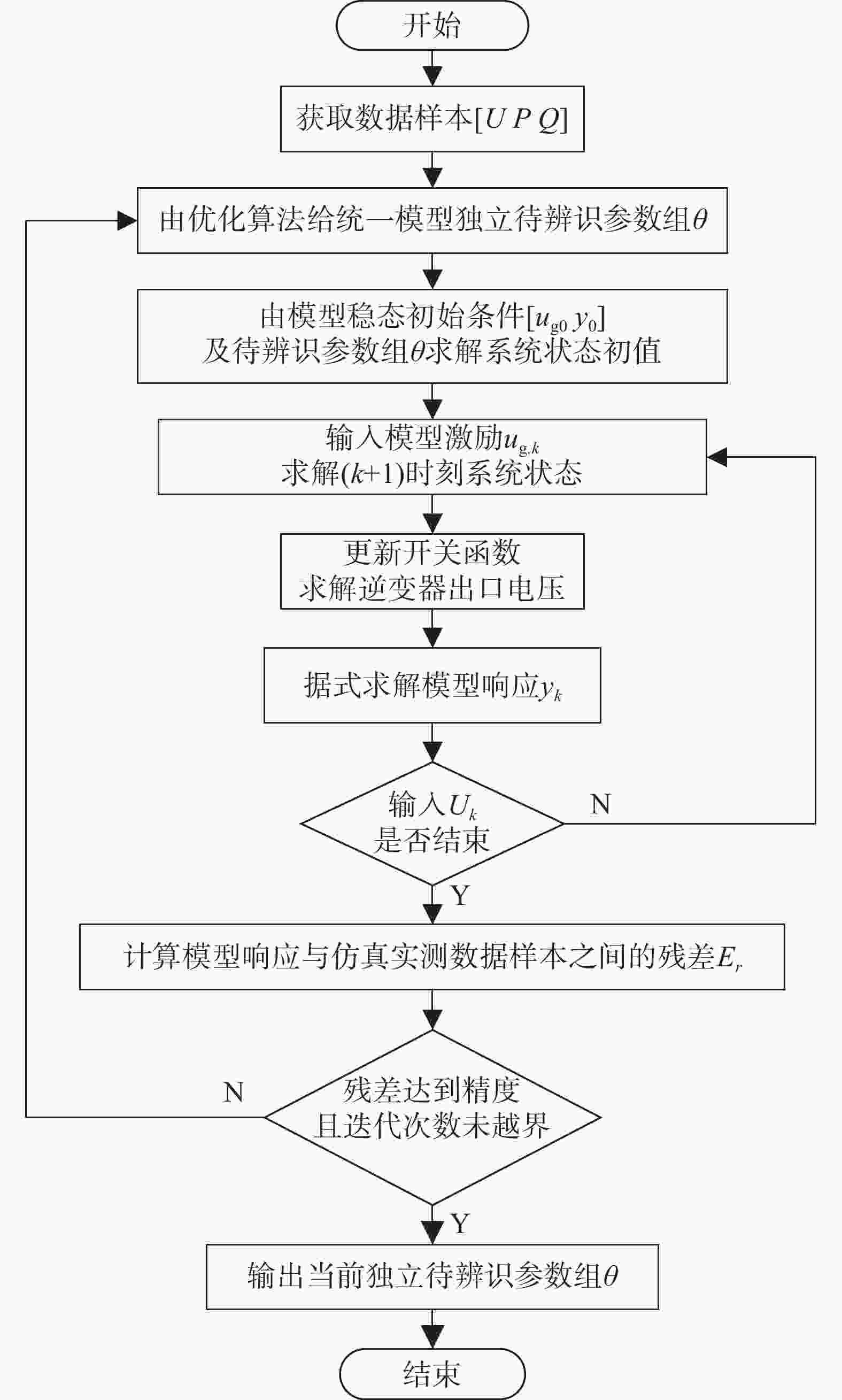
图 3 辨识流程图
Figure 3. Identification flow
(1)初始化:设置迭代次数$ {k_{\max }} $与预设精度$ \varepsilon $;
(2)获取样本数据$ \left[ {U{\text{ }}P{\text{ }}Q} \right] $;
(3)初始化待辨识参数组$ \theta $;
(4)由系统初值$ [{u_{g0}},{y_0}] $,结合待辨识参数组$ \theta $,解得$ {I}_{d0}、{I}_{q0}、{u}_{\text{dc}.0}^{*} $初值;
(5)输入模型激励$ {u_{g.k}} $(k≠0),结合式(14)求解$ {I}_{d.k+1}、{I}_{d.k+1}、{u}_{{\mathrm{dc}}.k}^{*} $;
(6)据式(18)求解$ S_{{\text{ }}d.k}^* $、$ S_{q.k}^* $,依据式(2)求解$ {\dot U_{{\text{i}},dq}} $;
(7)据式(6)求解输出$ {y_k} $;
(8)重复上述5~7步,获得完整模型输出$ y $;
(9)计算模型响应与实测数据间的残差$ {E_r} $;
(10)若残差小于$ \varepsilon $或迭代次数大于$ {k_{\max }} $,则停止辨识并输出当前参数组$ \theta $,否则重复上述4~9步。
-
通常,含分布式电源的负荷模型存在高维非线性特征,导致优化算法容易陷入局部最优,难以准确得到全局最优参数。相比传统的优化算法,白鲨优化算法求解过程与梯度信息无关,在求解复杂优化问题上具有一定优势。
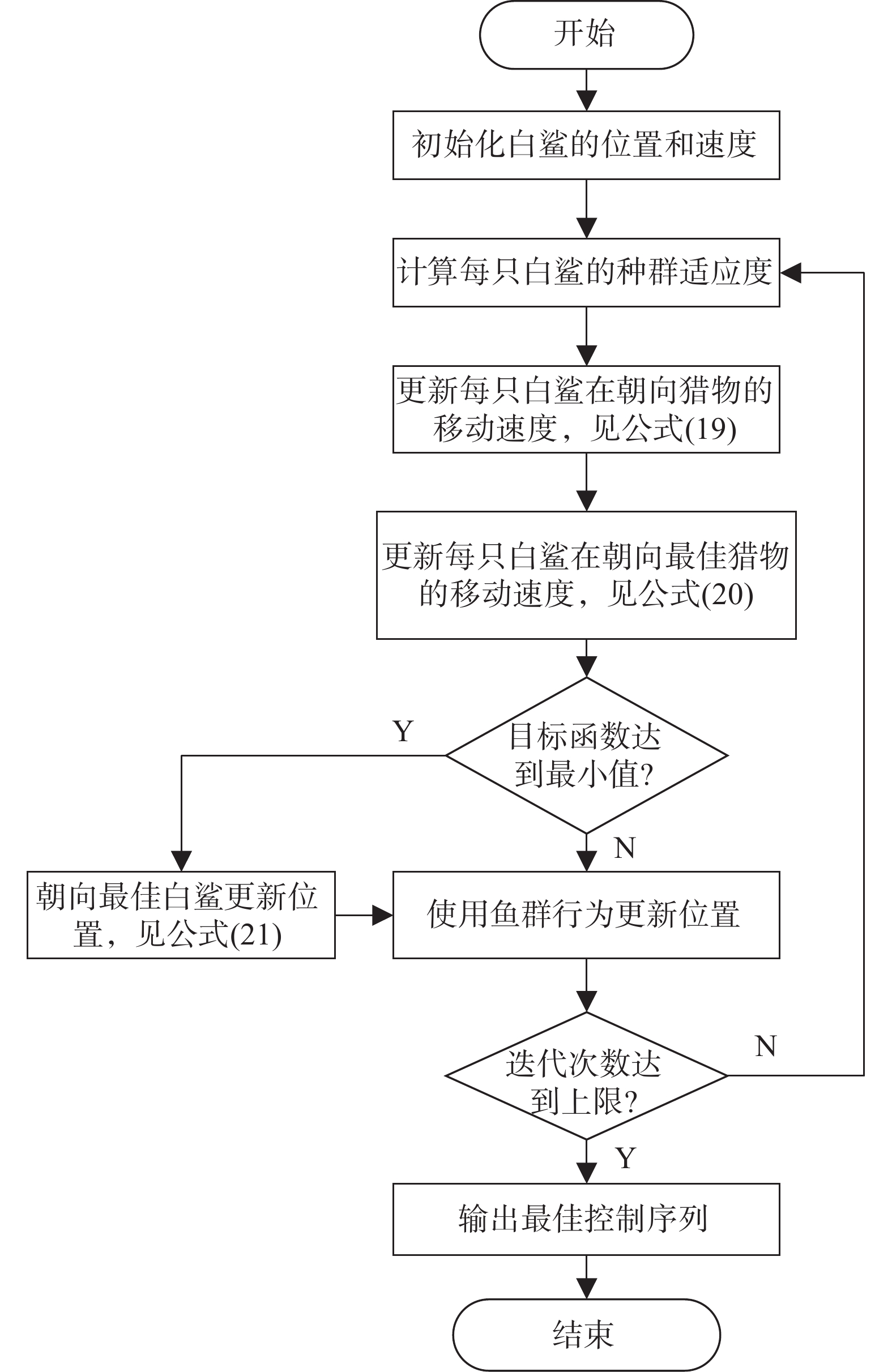
白鲨优化算法[22-23]由MalikBraik等人于2022年提出,该算法受大白鲨导航和觅食时具有的非凡听觉和嗅觉启发。该算法思路新颖,策略高效。白鲨优化算法的辨识流程如下图4所示。其主要步骤如下:
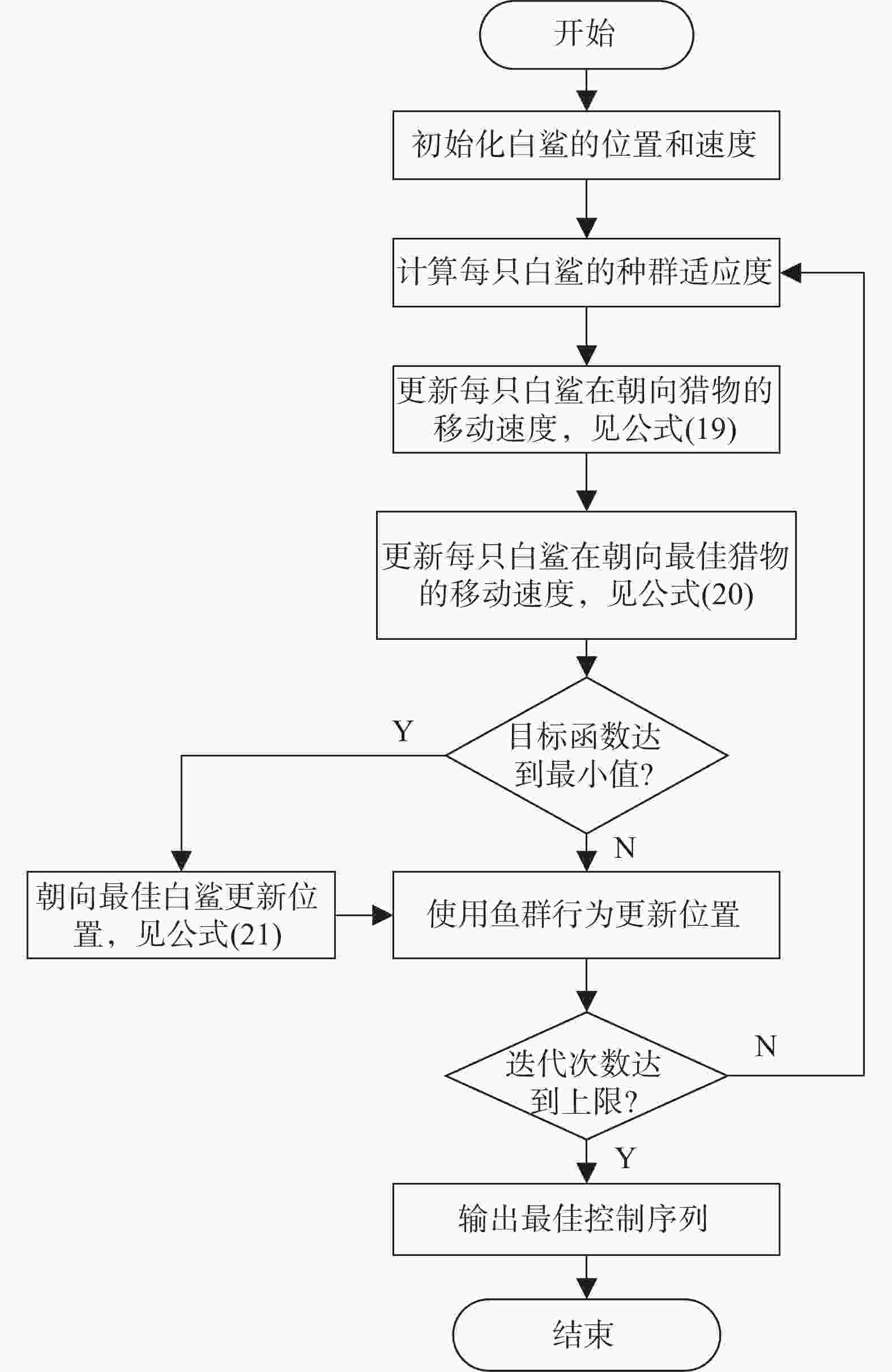
图 4 白鲨优化算法辨识流程
Figure 4. Identification process of WSO
步骤1:初始化白鲨种群,设置含分布式电源模型初始化参数和目标函数的适应度函数,并随机生成所有白鲨的位置和速度。
步骤2:根据每只白鲨Pi的参数,即每通过适应度函数评估每只白鲨的适应度值,作为选择标准。
步骤3:更新每只白鲨在朝向猎物阶段的移动速度V,公式如下:
$$ \begin{gathered} {V_i}(t + 1) = \alpha [{V_i}(t) + {\beta _1}{c_1}({P_{{\mathrm{Gbest}}}}(t) - {P_i}(t))+ \\ {\beta _2}{c_2}({P_{{\mathrm{ibest}}}}(t) - {P_i}(t))] \\ \end{gathered} $$ (20) 式中:
Pibest ——最佳实现位置;
PGbest ——当前全局最优位置;
$ \alpha $,$ {\beta _1} $,$ {\beta _2} $ ——数值常量;
c1,c2 ——0~1范围的随机数。
步骤4:更新每只白鲨在朝向最佳猎物阶段的位置,公式如下:
$$ {P_i}(t + 1) = \left\{ \begin{gathered} {P_i}(t) \times \neg \otimes + {\mathrm{high}} \cdot a + {\mathrm{low}} \cdot b,\;{\mathrm{rand}} < m \\ {P_i}(t) + \dfrac{{{V_i}(t)}}{f},{\text{ }}{\mathrm{rand}} \geqslant m \\ \end{gathered} \right. $$ (21) 式中:
a,b ——一维二进制向量;
f ——波浪运动的频率;
high ——随机搜索上边界;
low ——随机搜索下边界。
步骤5:若适应度函数达到阈值,则朝向最佳白鲨更新位置,并使用鱼群行为更新所有白鲨位置,公式如下:
$$ {P_i}(t + 1) = \left\{ \begin{gathered} {P_{{\mathrm{Gbest}}}}(t) + r_1^{} \cdot D \cdot {{\mathrm{sgn}}} ({r_2} - 0.5),{\text{ }}{r_3} < {S_s} \\ \dfrac{{{P_i}(t)}}{{{\mathrm{rand}}}},{\text{ }}{r_3} \geqslant {S_s} \\ \end{gathered} \right. $$ (22) 确定终止条件(通常设置为最大迭代次数或适应值的上限和下限)。如果满足,执行步骤6;否则,执行步骤2。
步骤6:输出全局最优解:计算当前鲨鱼群的个体极值和全局极值;通过在全局区域中搜索来获得系统控制输入的最佳控制序列。
-
按照上述给出的白鲨优化算法辨识流程来对所搭建逆变型DG的主导参数进行辨识。为进一步说明采用白鲨算法的有效性和优越性,将其于粒子群算法[24](Particle Swarm Optimization,PSO)及非线性最小二乘法(Non-Linear Least Squares Methad,NLSM)进行了对比的辨识结果,将三者进行对比分析,算例分析如下。
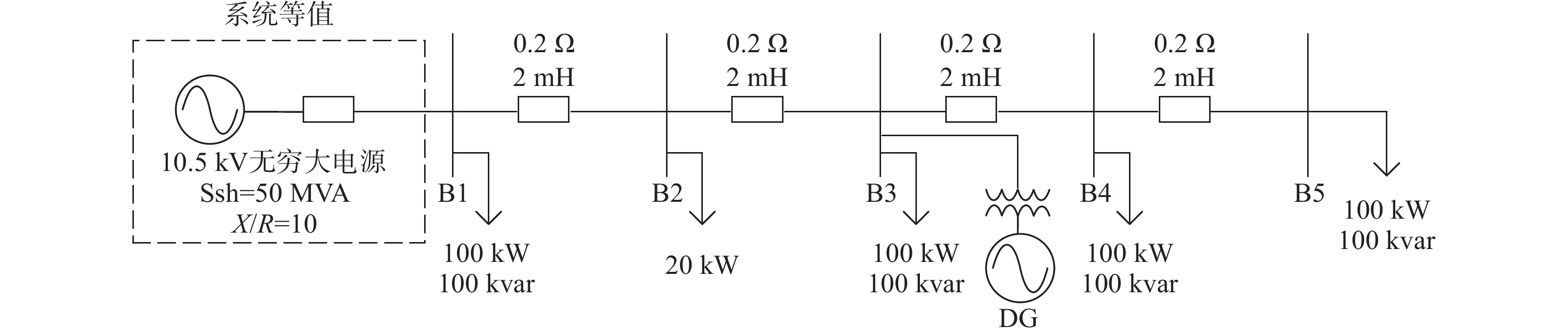
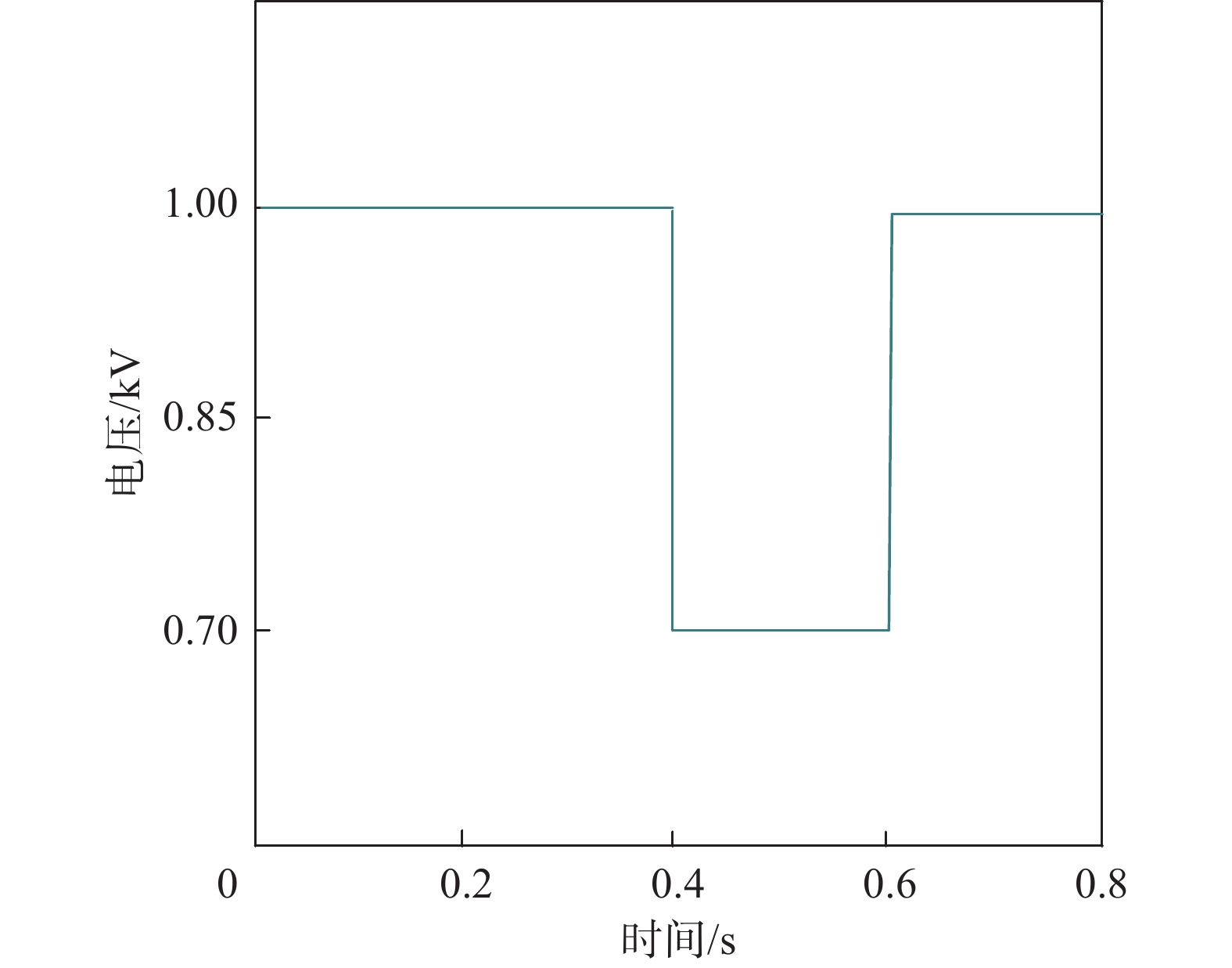
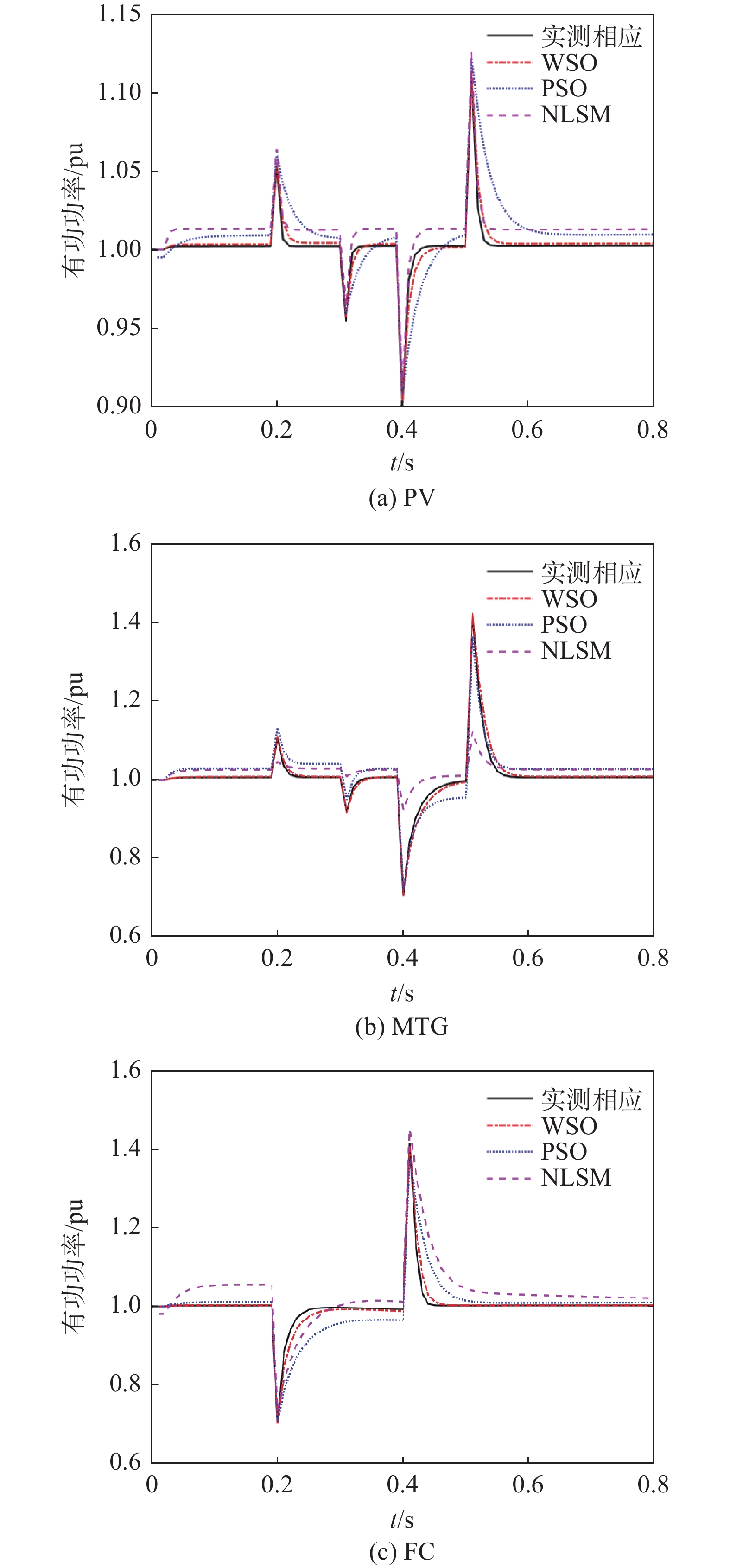
DG一般接入中低压配电网,构建了图5所示的10 kV配电网仿真系统。分别将MTG、PV、FC发电系统接入图5中DG所示位置,通过设置三相短路故障来使B3节点电压不同程度跌落不等时间。如图6所示,分别使电压跌落20%,30%,故障时间为0.2 s作为输入。在公共连接点处获取建模所需数据样本,数据采样频率为1 ms,共3组,作为逆变式DG的实测响应。分别采用白鲨优化算法,粒子群算法以及非线性最小二乘法对待辨识参数组$ \theta $进行寻优。采用平均方差MSE[25]来评判当前参数的好坏程度,即模型响应曲线对样本实测曲线拟合效果。3种优化算法所辨识的参数组$ \theta $的模型响应与实测响应的残差如表1所示。仿真响应及WSO、PSO及NLSM所寻优参数的模型响应如图7所示。
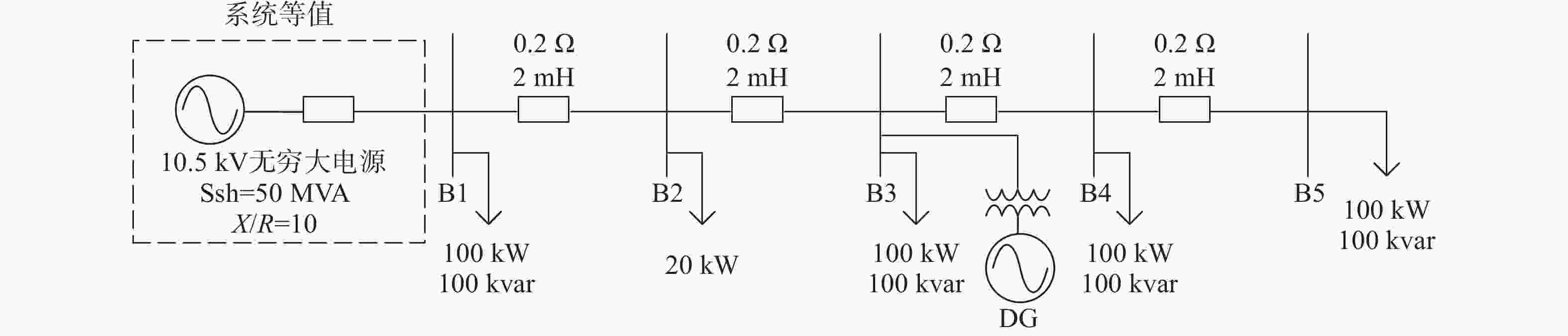
图 5 五节点系统单线图
Figure 5. Single-line diagram of the five-node system

图 6 电压跌落30%输入曲线
Figure 6. Input curve for a 30% voltage drop
表 1 辨识算法残差对比
Table 1. Comparison of residuals for identification algorithms
辨识算法 电压跌落20%MTG 电压跌落20%FC 电压跌落20%PV 电压跌落30%MTG 电压跌落30%FC 电压跌落30%PV WSO 0.000 13 0.000 89 0.000 49 0.000 25 0.001 03 0.000 83 PSO 0.036 00 0.005 31 0.007 44 0.004 21 0.007 12 0.008 13 NLSM 0.076 18 0.009 62 0.012 52 0.005 69 0.004 21 0.022 52 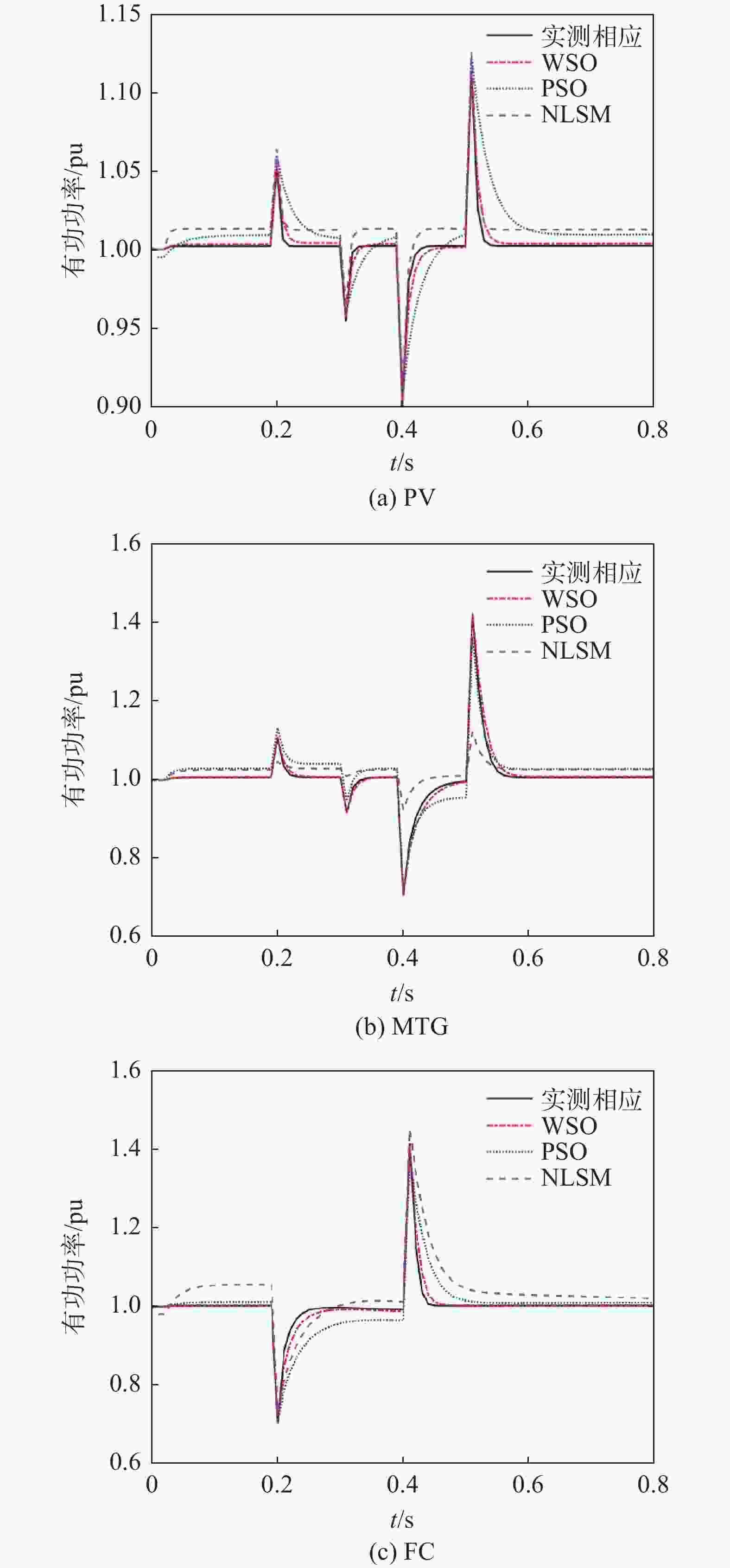
图 7 电压跌落30%时的模型有功拟合曲线
Figure 7. Active power fitting curve of model for a 30% voltage drop
对图7中不同类型的DG实际响应与模型响应对比分析可得:对不同类型的DG,对所搭建的模型进行测试取样,所得到的WSO寻优参数模型响应能较好地贴合实际曲线,这表明所搭建的模型能较好的描述IIDG的动态特性。
$$ {E_r} = \sum\limits_{k = 1}^N {{{\left[ {P\left( k \right) - {P_{\mathrm{m}}}\left( k \right)} \right]}^2}} /N $$ (23) 通过对比分析可得,在不同的压降扰动下,白鲨优化算法进行辨识得到的相关主导参数较粒子群算法及非线性最小二乘法能够更好的贴合模型响应。白鲨优化算法拟合的曲线误差更小,亦验证了这一点。表2为采用白鲨优化算法所辨识出的具体参数。由表可知:对各类逆变型DG来说,尽管施加的电压激励不同,模型参数的分散性仍较小,也间接说明所搭建模型的有效性,能够较好反应实际特性。而不同逆变型DG特性各异,发电容量也相差较大,因此不同DG模型辨识参数差异较大。
表 2 WSO算法参数辨识结果
Table 2. Parameter identification results of the WSO algorithm
DG类型 电压跌落 R L C ki1 kp1 ki2 kp2 MTG 20% 0.009 0.061 0.159 0.179 5.672 0.022 9.876 30% 0.008 0.059 0.124 0.245 5.691 0.027 9.241 PV 20% 0.004 0.086 0.030 0.058 9.678 0.070 5.672 30% 0.009 0.069 0.051 0.043 8.365 0.142 4.239 FC 20% 0.018 0.059 9.194 0.027 4.515 0.171 6.379 30% 0.024 0.345 8.214 0.148 3.517 0.249 7.369 从图7的模型拟合曲线来看,所搭建的逆变式DG模型响应与实测响应的误差较小,这表明所搭建的模型能较好的描述逆变式DG的动态特性,具有较强的自描述能力。经计算均方误差较小,也体现这一点。
-
文章对含IIDG的负荷模型进行搭建并采用一种新颖的参数辨识方法,基于理论研究与仿真分析得到以下结论:
1)基于分布式电源和并网发电系统特点,对一些典型DG进行分析,提出了一种IIDG统一负荷模型。
2)结合所提出的统一模型,搭建仿真系统,给出统一模型完整的辨识流程,采用多种辨识算法并对其进行对比分析:WSO具有较强的全局搜索能力和收敛速度,能够在多变量优化问题中快速找到最优解。
3)统一模型自描述能力和参数稳定性的验证结果来看,文章提出IIDG统一负荷能较好地描述逆变型DG的外特性,且对特定DG,在不同电压激励下参数分散性较小,均表明统一模型能较好地描述逆变型DG相关特性。
Load Model Construction and Parameter Identification Method of Inverter-Interfaced Distributed Generator
-
摘要:
目的 分布式电源(DG)对电网负荷侧的运行特性具有重要影响,然而当前研究侧重于单一类型的分布式电源特性分析和建模,针对能够对具有一定相似性的DG进行统一描述的通用模型研究较少。 方法 文章对1种逆变型分布式电源(IIDG)模型进行搭建,并采用1种新颖的优化算法。首先基于对IIDG特点及其共有特性的分析,搭建了含IIDG的综合负荷模型;根据所搭建的统一模型进行分析计算,推导得到逆变型分布式电源系统的状态微分方程,系统模型的输出方程。为通过连续迭代和开关函数更新计算系统各时刻的状态和响应,给出系统的状态初值的计算公式。结合样本数据,给出统一模型辨识流程。最后采用白鲨优化算法(WSO)对模型进行参数辨识;最后考虑电压跌落扰动情况,通过对该系统模型进行采样分析。 结果 仿真结果表明,所提出的统一模型在不同程度的电压跌落的情况下,均能够较好地反映IIDG特性。 结论 建模误差与参数辨识结果表明所提出的统一模型具有良好的自描述能力及参数稳定性。 Abstract:Introduction Distributed generation (DG) has a significant impact on the operational characteristics of the load side of the power grid. However, current research focuses mainly on analyzing and modeling the characteristics of a single type of distributed generation, and there is limited research on general models that can uniformly describe DGs with certain similarities. Method This article constructed an inverter-interfaced distributed generator (IIDG) model and employed a novel optimization algorithm. Firstly, based on the analysis of the characteristics and common features of IIDG, a comprehensive load model containing IIDG was constructed; According to the unified model, analytical calculations were performed to derive the state differential equation of the IIDG system and the output equation of the system model. To calculate the state and response of the system at each moment through continuous iteration and switch function updates, a formula for calculating the initial value of the system's state was provided. Combined with the sample data, the unified model identification process was given. Finally, the white shark optimizer (WSO) algorithm was employed to identify the parameters of the model; considering the voltage drop disturbance, the system model was sampled and analyzed. Result The simulation results show that the proposed unified model can better reflect the IIDG characteristics in the case of different levels of voltage drop. Conclusion The modeling error and parameter identification results show that the proposed unified model has good self-describing ability and parameter stability. -
图 1 含逆变型分布式电源的负荷模型构建的原理图
Fig. 1 Construction schematic diagram of the load model of IIDG
图 7 电压跌落30%时的模型有功拟合曲线
Fig. 7 Active power fitting curve of model for a 30% voltage drop
表 1 辨识算法残差对比
Tab. 1. Comparison of residuals for identification algorithms
辨识算法 电压跌落20%MTG 电压跌落20%FC 电压跌落20%PV 电压跌落30%MTG 电压跌落30%FC 电压跌落30%PV WSO 0.000 13 0.000 89 0.000 49 0.000 25 0.001 03 0.000 83 PSO 0.036 00 0.005 31 0.007 44 0.004 21 0.007 12 0.008 13 NLSM 0.076 18 0.009 62 0.012 52 0.005 69 0.004 21 0.022 52  下载: 导出CSV
下载: 导出CSV
表 2 WSO算法参数辨识结果
Tab. 2. Parameter identification results of the WSO algorithm
DG类型 电压跌落 R L C ki1 kp1 ki2 kp2 MTG 20% 0.009 0.061 0.159 0.179 5.672 0.022 9.876 30% 0.008 0.059 0.124 0.245 5.691 0.027 9.241 PV 20% 0.004 0.086 0.030 0.058 9.678 0.070 5.672 30% 0.009 0.069 0.051 0.043 8.365 0.142 4.239 FC 20% 0.018 0.059 9.194 0.027 4.515 0.171 6.379 30% 0.024 0.345 8.214 0.148 3.517 0.249 7.369
下载: 导出CSV
-
[1] 李颖峰, 史腾肖, 库城银, 等. 分布式电源接入对配电网网络损耗的影响研究 [J]. 电工技术, 2022(14): 160-163. DOI: 10.19768/j.cnki.dgjs.2022.14.049. LI Y F, SHI T X, KU C Y, et al. Research on the influence of distributed power access on distribution network loss [J]. Electric engineering, 2022(14): 160-163. DOI: 10.19768/j.cnki.dgjs.2022.14.049. [2] 肖峻, 王传奇. 配电网分布式发电渗透率极限值定义与计算方法 [J]. 电网技术, 2024, 48(1): 352-360. DOI: 10.13335/j.1000-3673.pst.2022.1977. XIAO J, WANG C Q. Definition and calculation method of DG penetration limit values of distribution network [J]. Power system technology, 2024, 48(1): 352-360. DOI: 10.13335/j.1000-3673.pst.2022.1977. [3] 韩平平, 张楠, 潘薇, 等. 配电网状态估计可观性研究综述 [J]. 电力系统及其自动化学报, 2022, 34(4): 11-21. DOI: 10.19635/j.cnki.csu-epsa.000787. HAN P P, ZHANG N, PAN W, et al. Review of research on observability of distribution network state estimation [J]. Proceedings of the CSU-EPSA, 2022, 34(4): 11-21. DOI: 10.19635/j.cnki.csu-epsa.000787. [4] 王吉利, 贺仁睦, 马进. 配网侧接入电源对负荷建模的影响 [J]. 电力系统自动化, 2007, 31(20): 22-26, 40. DOI: 10.3321/j.issn:1000-1026.2007.20.005. WANG J L, HE R M, MA J. Impact of connecting power sources on load modeling in a distribution network [J]. Automation of electric power systems, 2007, 31(20): 22-26, 40. DOI: 10.3321/j.issn:1000-1026.2007.20.005. [5] 毛万成, 李勇, 彭衍建, 等. 光伏/微型燃气轮机混合微电网协调控制策略 [J]. 电力系统及其自动化学报, 2018, 30(4): 22-29. DOI: 10.3969/j.issn.1003-8930.2018.04.004. MAO W C, LI Y, PENG Y J, et al. Coordination control strategy for PV/micro-turbine hybrid micro-grid [J]. Proceedings of the CSU-EPSA, 2018, 30(4): 22-29. DOI: 10.3969/j.issn.1003-8930.2018.04.004. [6] 刘君, 穆世霞, 李岩松, 等. 微电网中微型燃气轮机发电系统整体建模与仿真 [J]. 电力系统自动化, 2010, 34(7): 85-89. LIU J, MU S X, LI Y S, et al. Overall modeling and simulation of microturbine generation systems in microgrids [J]. Automation of electric power systems, 2010, 34(7): 85-89. [7] GHOLAMI A, AMERI M, ZANDI M, et al. A fast and precise double-diode model for predicting photovoltaic panel electrical behavior in variable environmental conditions [J]. International journal of ambient energy, 2023, 44(1): 1298-1315. DOI: 10.1080/01430750.2023.2173290. [8] 屈星, 李欣然, 盛义发, 等. 面向广义负荷的光伏发电系统等效建模研究 [J]. 电网技术, 2020, 44(6): 2143-2150. DOI: 10.13335/j.1000-3673.pst.2019.1498. QU X, LI X R, SHENG Y F, et al. Research on equivalent modeling of PV generation system for generalized load [J]. Power system technology, 2020, 44(6): 2143-2150. DOI: 10.13335/j.1000-3673.pst.2019.1498. [9] 王善立, 龙军. 含分布式储能的光伏发电系统建模与仿真 [J]. 电源技术, 2016, 40(10): 1973-1975, 2047. DOI: 10.3969/j.issn.1002-087X.2016.10.021. WANG S L, LONG J. Modeling and simulation of a PV system with DESS [J]. Chinese journal of power sources, 2016, 40(10): 1973-1975, 2047. DOI: 10.3969/j.issn.1002-087X.2016.10.021. [10] 马腾, 付常亮, 祝得治, 等. 固体氧化物燃料电池电堆电特性的建模 [J]. 电源技术, 2011, 35(11): 1364-1367. DOI: 10.3969/j.issn.1002-087X.2011.11.010. MA T, FU C L, ZHU D Z, et al. Modeling of electrical characteristics of a SOFC stack [J]. Chinese journal of power sources, 2011, 35(11): 1364-1367. DOI: 10.3969/j.issn.1002-087X.2011.11.010. [11] YU R J, GUO H, CHEN H, et al. Influence of different parameters on PEM fuel cell output power: a three-dimensional simulation using agglomerate model [J]. Energy conversion and management, 2023, 280: 116845. DOI: 10.1016/j.enconman.2023.116845. [12] 王玲, 李欣然, 马亚辉, 等. 燃料电池发电系统的机电动态模型 [J]. 中国电机工程学报, 2011, 31(22): 40-47. DOI: 10.13334/j.0258-8013.pcsee.2011.22.001. WANG L, LI X R, MA Y H, et al. Dynamic model of fuel cell power generating system [J]. Proceedings of the CSEE, 2011, 31(22): 40-47. DOI: 10.13334/j.0258-8013.pcsee.2011.22.001. [13] 刘普仁, 李奇, 孟翔, 等. 基于多向差分进化算法的氢燃料电池市域动车组运行协同优化 [J]. 中国电机工程学报, 2024, 44(3): 1007-1019. DOI: 10.13334/j.0258-8013.pcsee.221627. LIU P R, LI Q, MENG X, et al. Collaborative optimization of hydrogen fuel cell urban emu operation based on multi-directional differential evolution algorithm [J]. Proceedings of the CSEE, 2024, 44(3): 1007-1019. DOI: 10.13334/j.0258-8013.pcsee.221627. [14] 汪海姗, 王冰, 张秋桥, 等. 独立直流微电网中多组燃料电池分布式协同控制 [J]. 电气自动化, 2021, 43(2): 44-46. DOI: 10.3969/j.issn.1000-3886.2021.02.016. WANG H S, WANG B, ZHANG Q Q, et al. Distributed cooperative control of multi-group fuel cells in independent DC micro-grids [J]. Electrical automation, 2021, 43(2): 44-46. DOI: 10.3969/j.issn.1000-3886.2021.02.016. [15] 何雄峰, 李先允, 谈益珲, 等. 微型燃气轮机发电系统LVRT特性分析研究 [J]. 电气技术, 2016, 17(6): 18-24. DOI: 10.3969/j.issn.1673-3800.2016.06.005. HE X F, LI X Y, TAN Y H, et al. Performance analysis and research on microturbine generation system with LVRT [J]. Electrical engineering, 2016, 17(6): 18-24. DOI: 10.3969/j.issn.1673-3800.2016.06.005. [16] 马亚辉. 含分布式电源的综合负荷建模方法研究 [D]. 长沙: 湖南大学, 2013. MA Y H. Studies on composite load modeling of distribution network considering distributed generation [D]. Changsha: Hunan University, 2013. [17] 任晓红, 万红, 俞啸, 等. 基于Park变换的三电平逆变器开路故障诊断 [J]. 工矿自动化, 2020, 46(5): 82-86, 93. DOI: 10.13272/j.issn.1671-251x.17523. REN X H, WAN H, YU X, et al. Open-circuit fault diagnosis of three-level inverter based on Park transformation [J]. Industry and mine automation, 2020, 46(5): 82-86, 93. DOI: 10.13272/j.issn.1671-251x.17523. [18] 冯茜, 李擎, 全威, 等. 多目标粒子群优化算法研究综述 [J]. 工程科学学报, 2021, 43(6): 745-753. DOI: 10.13374/j.issn2095-9389.2020.10.31.001. FENG Q, LI Q, QUAN W, et al. Overview of multiobjective particle swarm optimization algorithm [J]. Chinese journal of engineering, 2021, 43(6): 745-753. DOI: 10.13374/j.issn2095-9389.2020.10.31.001. [19] GOLDBERG D E. Genetic algorithms in search, optimization, and machine learning [M]. Reading: Addison-Wesley Pub. Co., 1989. [20] GREWAL M S, ANDREWS A P. Kalman filtering: theory and practice using MATLAB® (3rd ed. ) [M]. Hoboken: Wiley-IEEE Press, 2008. [21] GUO P, ZHU L. Ant colony optimization for continuous domains [C]//2012 8th International Conference on Natural Computation, Chongqing, China, May 29-31, 2012. Chongqing: IEEE, 2012: 758-762. DOI: 10.1109/ICNC.2012.6234538. [22] BRAIK M, HAMMOURI A, ATWAN J, et al. White shark optimizer: a novel bio-inspired meta-heuristic algorithm for global optimization problems [J]. Knowledge-based systems, 2022, 243: 108457. DOI: 10.1016/j.knosys.2022.108457. [23] FATHY A, YOUSRI D, ALHARBI A G, et al. A new hybrid white shark and whale optimization approach for estimating the Li-ion battery model parameters [J]. Sustainability, 2023, 15(7): 5667. DOI: 10.3390/su15075667. [24] 李小明, 董智, 高明, 等. 基于粒子群算法的中低压配电网网格化规划模型 [J]. 电气自动化, 2023, 45(2): 58-60. DOI: 10.3969/j.issn.1000-3886.2023.02.018. LI X M, DONG Z, GAO M, et al. Grid planning model of medium and low voltage distribution network based on particle swarm algorithm [J]. Electrical automation, 2023, 45(2): 58-60. DOI: 10.3969/j.issn.1000-3886.2023.02.018. [25] 谢涛, 张春炯, 徐永健. 基于历史梯度平均方差缩减的协同参数更新方法 [J]. 电子与信息学报, 2021, 43(4): 956-964. DOI: 10.11999/JEIT200061. XIE T, ZHANG C J, XU Y J. Collaborative parameter update based on average variance reduction of historical gradients [J]. Journal of electronics & information technology, 2021, 43(4): 956-964. DOI: 10.11999/JEIT200061. -

计量
- 文章访问数: 136
- HTML全文浏览量: 53
- PDF下载量: 8
- 被引次数: 0
