-
南方电网“十三五”电网运营规划提出,要全面推行“机巡+人巡”的巡线模式的综合研究与应用,实现“机巡为主、人巡为辅”的协同巡检目标[1]。据南方电网生技部统计,约70%的电网故障隐患由树障隐患引起,目前树障隐患巡视与分析已成为输电部门的主要工作。随着无人机可见光航测技术的飞速发展,可见光航测树障巡视与分析技术已成为当前输电线路树障隐患分析的主要方式,但其数据处理的专业性强、计算量大、人工交互工作量大,严重制约了数据处理的效率。
机载激光雷达(LiDAR)技术和点云数据处理技术的出现,为地理空间三维数据的获取和处理提供了全新的技术手段[2],丰富了输电线路巡视的手段,提高了点云数据处理与分类、树障隐患处理与分析的效率[3,4,5]。海量点云数据的精确分类,是进行树障智能分析的前提和基础。传统的点云数据分类方法由于自动化程度低、分类效果差、分类算法复杂等缺点[6,7,8,9,10],已无法满足当前的业务需求。因此,本文基于机载激光雷达,提出一种新的点云自动分类算法,并将该算法运用于树障智能分析中,实现树障点云的全自动快速分类,以提高地理空间三维信息数据的获取精度和处理效率。
HTML
-
机载激光雷达由于作业效率高、观测精度高、机动灵活、不受云雾遮挡、作业范围广、自动化程度高等优点[11],已逐渐成为对地观测的重要技术手段之一。基于机载激光雷达的优势,结合无人机的作业特点,本文采用自主研发的激光雷达无人机来获取输电线路的点云数据。
激光雷达无人机由M600 Pro无人机和Velodyne VLP 32C激光雷达组成(如图1所示,参数如表1和表2所示),一体化集成了高精度中距激光扫描仪、航摄相机、GNSS和IMU定位姿态系统集存储控制单元,以时间同步技术和一体化多传感器集成技术为支撑,可同步获取三维激光点云和定位定姿数据,具有集成度高、操作简便、性能出色、高效率、高质量等优点,获取的数据如图2所示。

Figure 1. Laser radar UAV

Figure 2. Point cloud data
项目 参数 项目 参数 激光传感器 Velodyne VLP 32C 测量距离/m 200 最大有效测量速率/(Pts·s-1) 1.2×106 测距精度/cm 2 波长 近红外 垂直视野/(°) -25~15 安全等级 1级,人眼安全 水平视野/(°) 360 Table 1.
Parameters of LIDAR 项目 参数 项目 参数 任务荷载/kg 5.5 最大可承受风速/(m·s-1) 8 飞行时间(满载)/min 16 最大速度/(km·h-1) 65 悬停精度/m 垂直:±0.5 最大水平飞行速度/(km·h-1) 65(无风环境)遮挡 水平:±1.5 最大上升速度/(m·s-1) 5 工作环境温度/ ℃ -10 ℃至40 ℃ Table 2.
Parameters of multi rotor UAV -
空间三维点云数据由于具有不连续性、不规则性,以及地物形态的多样性等,使得点云数据的自动分类具有一定的复杂性,在复杂地形、地物繁杂和不连续地表中易存在错分、漏分等现象。为解决上述问题,本文提出一种新的点云分类技术,以实现点云数据的精确分类,具体流程如图3所示。

Figure 3. Data processing flow
-
基于电力线的横担宽和点云的属性值,采用改进的快速三维凸包构造算法来确定杆塔的位置,从而实现杆塔点云的提取与分类。该算法是在QuickHull算法的基础上进行改进的,有效地避免了更新拓扑关系带来的大量计算,提高了数据处理的效率。
-
基于断面分析法获取的断面点云数据,利用k-means聚类分析算法、筛选算法以及基于法向约束的点云融合算法等确定电力线的数目和起点,并基于高度的最小值确定电力线的下导线。然后利用区域生长算法进行导线追踪,实现电力线点云的提取与分类。该方法速度快、准确性高,可有效避免错分、漏分等现象。
1)k-means聚类分析算法
k-means聚类分析算法把n个对象分为k个类别,使每个类别内部内具有较高的相似度,而类别间的相似度较低,通常采用平方误差准则,其定义如下:
((1)) 式中:E是全部对象平方误差的总和;p是空间中的点;mi是类别Ci的平均值。
2)基于法向约束的点云融合算法
基于法向约束的点云融合算法是种子点沿点的法向移动的结果,其位置定义为:
((2)) 融合点的法向为:
((3)) 式中:Pi为种子点;nPi为Pi的法向;Ci为Pi的子点;Sc为Ci的位置加权和;Wc为Ci的正则化系数;
3)区域生长算法
区域生长算法原理为将具有相似特征的点云归集到一类构成区域。首先对每个需要分割的区域筛选出一个种子点云作为生长的起点,再将种子点云附近邻域中与其有相同或相似性质的点云(相似性准则需实现预设)合并到种子点云所在的区域中。同时,新的点云成为新的种子,向四周生长,直到再没有满足条件的点云可以划分进来,这时候一个区域即生长完成。
区域生长具体步骤如下:
1)对点云数据按照顺序进行扫描,找到第1个还没有归类的点云,设该点云坐标为(x0, y0, z0)。
2)以(x0, y0, z0)中心,考虑(x0, y0, z0)的邻域点云(x, y, z),如果(x, y, z)满足生长准则,将(x, y, z)与(x0, y0, z0)合并(在同一区域内),同时将(x, y, z)压入堆栈。
3)从堆栈中取出一个点云,把它当作(x0, y0, z0)返回到第2步。
4)当堆栈为空时,返回到第1步。
5)重复步骤1-4直到图像中的每个点都有相应分类时,生长完成。
-
最后,基于筛选出的杆塔点云和电力线点云,对点云数据进行叠加分析,以实现植被点云的提取与分类。
1.1 数据获取
1.2 数据处理
1.2.1 杆塔点云的提取与分类方法
1.2.2 电力线点云的提取与分类方法



1.2.3 植被点云的提取与分类方法
-
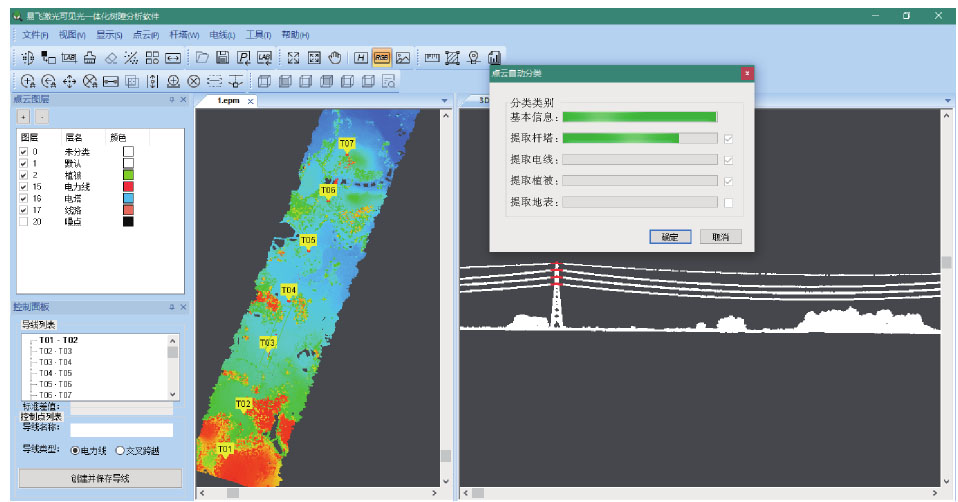
为有效地减少点云数据处理的人工工作量、降低树障隐患分析的专业要求和操作难度,本文基于上述点云分类算法,研发了一套树障隐患分析软件。该软件实现了一键式点云自动分类,点云的处理效率可达60 km/h,有效地提高了地理空间三维信息数据的处理效率。点云自动分类界面如图4所示,点云自动分类的结果如图5所示,图6为点云自动分类结果的放大图。

Figure 4. Point cloud automatic classification interface

Figure 5. Results of automatic classification of point clouds

Figure 6. Results of automatic classification of points (amplification)
结果表明,点云分类的正确率可达到95%以上,点云自动分类的效率可达60 km/h,且在杆塔与电力线、杆塔与植被相互交叉的复杂区域,也取得了较好的分类效果,错分、漏分等现象极少。由此可知,本文提出的点云自动分类方法分类精度高、分类效果佳、处理速度快,解决了传统点云数据分类自动化程度低、分类效果差等问题,有效地提高了地理空间三维信息数据的处理精度和效率。
点云数据的分类是进行树障智能分析的前提和基础,将本文提出的点云自动分类方法应用于树障隐患的分析中,可实现一键式点云自动分类和树障隐患分析。结果表明,树障隐患自动分析的效率可达720档/h,自动分析的精度可达到50 cm。
-
机载激光雷达为地理空间三维数据的获取提供了全新的技术手段,本文通过自主研发的激光雷达无人机,有效地提高了点云数据获取的效率和质量。基于获取的点云数据,本文提出了一种新的点云自动分类方法。该方法分类精度高、分类效果佳、处理速度快,点云分类的正确率可达到95%以上,点云自动分类的效率可达60 km/h,对于复杂区域也有较好的分类效果,错分、漏分等现象极少,有效地提高了地理空间三维信息数据的处理精度和效率。
基于本文提出的点云自动分类方法,将其应用于输电线路的树障隐患分析中,可使树障隐患自动分析的效率达720档/h,自动分析的精度达到50 cm。该方法的应用,有效地减少了点云数据处理的人工工作量、降低了树障隐患分析的专业要求和操作难度,为树障隐患的分析提供了高效率、高质量、全自动、智能化的数据处理手段,提高了树障隐患处理与分析的效率。

 DownLoad:
DownLoad: