-
由于海上风电通常靠近能源消耗中心且风资源情况优于陆上风电,风电的利用开发正逐渐从陆地转向海洋,正呈现加速发展的态势[1]。但由于近海空间资源有限,海上风电的发展也必然像过去油气工业那样,不断地从浅近海走向深远海。相应的,海上风机支撑结构形式也伴随水深变化,从固定式支撑结构到漂浮式支撑结构演变[2],如图1所示。

Figure 1. Offshore wind turbines foundation changes with water depth
1972年,美国马萨诸塞大学安默斯特分校的Heronemus教授[3]首次提出了海上漂浮式风机的技术概念,但限于当时的技术水平和高昂的建设成本,相关技术并未引起广泛关注。按现有的技术条件,当水深超过60 m之后,漂浮式海上风机将比固定
式海上风机更具有工程经济性,并随着水深增加而愈加凸显其经济优势[4]。因此,海上漂浮式风机极大地拓展了海上风电的应用范围,并且具有诸多的优势[5],例如:机位部署更加灵活、可在岸上完成整体组装、海上施工安装更加方便、可完全拆解与迁移、可搭载更大功率的风电机组等。
近年来随着海上风机的单机功率大型化和海上风场走向深远海,漂浮式风机技术正成为热点研究方向之一,不断涌现出新形式,大体可按照其静稳性原理将之划分为以下四种类型及其综合形式[6]:
立柱式(Spar):该类型平台的重心设计远低于浮心。当平台发生倾斜时,重心和浮心之间形成回复力偶可抵抗平台的倾斜运动。另外较小的水线面设计,可减小平台垂荡运动,但较大的平台吃水设计导致工作水深有特定要求,通常大于100 m。
半潜式(Semi):该类型平台在风机倾斜时,可通过分布式的浮筒结构产生较大的水线面变化,进而产生抵抗平台倾斜运动的回复力矩。适用水深通常大于40 m,平台的各方向运动适中,但对低频波浪二阶力较为敏感。其适用水深范围较广,可采用湿拖法运输,部署灵活,技术较为成熟。
张力腿式(TLP):该类型平台通过垂向下的系泊张力平衡浮体向上的超额浮力,类似“上下绷紧”的结构。因此,具有较好的平台垂向运动性能,但是其安装过程较为复杂,且张力腱结构造价较高,目前国内缺乏相关的制造和施工安装经验。适用水深通常大于40 m,对高频波浪二阶力敏感。
驳船式(Barge):该类型平台类似于船型,利用平台浮力抵消重力,适应水深通常大于30 m,垂向运动固有频率在一阶波浪频率范围内,故波频响应较为敏感,设计时需要进行平台运动频率优化。结构形式简单,容易制造,稳性较好,可采用湿拖法整体运输,部署灵活且成本较低。
四种风机类型如图2所示。

Figure 2. Four types of floating wind turbines
这些概念设计大多以欧洲、美国和日本等沿海发达国家为主。目前国内的海上漂浮式风电的实尺度样机测试和浮式风场建设仍然处于空白阶段。但近些年来,随着我国海上风电行业的快速发展,漂浮式风机技术工程化在我国得到了空前的重视。2016年6月,国家发改委、国家能源局、工信部联合印发《中国制造2025—能源装备实施方案》,提出“重点发展海上漂浮式风力发电机组及各种基础结构”。2016年12月,国家海洋局发布《海洋可再生能源发展“十三五”规划》,要求实施海洋能科技创新发展,明确提出研发深海浮式风电机组,掌握远距离水深的大型海上风电场设计、建设以及运维等关键技术,推进深海风电发展。2018年,广东省海洋渔业厅的海洋专项资金支持了“浮式海上风电平台全耦合动态分析及其装置研发”项目。2018年,国家工业和信息化部的高技术船舶课题对“海上浮式风电装备研制”项目进行了科研立项。
本文首先介绍了浮式风机的基本类型,接着分别介绍其稳性校核技术、系泊与动态海缆技术、水动力特性研究现状、气动力特性研究现状、一体化计算研究现状、模型试验研究现状、建造与安装技术、工程挑战与案例,最后对浮式风电市场与拓展运用做了相关展望,以期梳理漂浮式风电关键技术现状,为相关技术研发和工程项目提供参考。
HTML
-
海洋工程结构物稳性指的是在其在拖航、安装和使用过程中,结构物所具有的抗倾覆和抗滑移的能力[8]。在海上浮式风机的设计工作中,首要的目标是能够保证其浮式基础的稳性,以保障其在服役的各阶段不发生倾覆性后果。因此,海上浮式风机设计的首要步骤是进行相应的稳性计算与校核。可依据不同阶段,划分为拖航、安装和使用过程的稳性校核。另外,根据浮体是否发生破舱(压载舱)事故,又可以分为完整稳性校核和破舱稳性校核。其中,破舱稳性校核作为事故工况中较危险的情况,设计时需要格外注意。
当前海上漂浮式风机还没有成熟完善的规范指导其稳性计算与校核工作,国内外研究者主要以海洋油气平台的相关规范[9,10]作为浮式风机稳性校核参考。根据现有规范要求,浮体摇摆角度和力矩关系如图3所示。当浮体受到外部倾覆力矩时,从正浮状态逐渐倾斜至第二交点或进水角处的复原力矩曲线下的面积中的较小者,至少应比至同一限定角处的风倾力矩曲线下的面积大30%,且复原力臂在上述的范围内要保持正值和回复力消失角(回复力矩曲线与倾斜轴的第二个交点)大于36°。Henderson等人[5]指出风轮的气动推力乘以塔架高度所得到的风倾力矩是浮式风机进行稳性校核的外力矩。Collu[11]借鉴浮式油气平台的相关规范建立了海上漂浮式风机平台的稳性评价标准和规范体系,研究了浮式风机平台在非运行阶段,如组装、海上拖运和安装等过程的稳性评价标准。Musial等人[5]却指出油气平台和浮式风机的安全等级不同,盲目参考可能会导致设计偏保守。因为油气平台上常驻运维人员,且一旦发生倾覆就极有可能引发石油泄漏和人员伤亡等严重后果,而浮式风机不需要运维人员长期驻扎,其安全等级可以适当降低,稳性校核标准也应该相应地降低。参考船舶与油气平台设计经验,提高浮式风机的稳性措施有:降低浮体重心、增加浮体干舷、增加浮体的宽度、注意浮体水线以上的开口位置和风雨密性及水密性等。

Figure 3. Stability checking curve for floating wind turbines
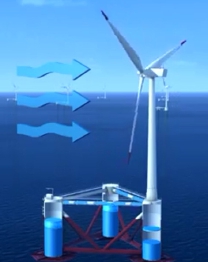
由于海上漂浮式风机具有高耸的塔筒结构,风轮受到气动推力将会产生巨大的倾覆力矩,因此部分浮式风机采用主动压载调节系统以调节浮式风机的平衡姿态,提高浮式风机稳性。例如, 半潜型浮式风机WindFloat三个柱体内的压载舱室可根据浮式平台的实时姿态进行压载水闭环调节,以提高浮式风机受风荷载时的稳性。但该主动压载调节设备费用较为高昂,增加系统复杂性,如图4所示。

Figure 4. Active ballast balance system for floating wind turbines
-
漂浮式风机作为海上浮式结构物,需要通过系泊系统进行位置和运动的约束。其力学作用机理主要通过系泊材料的变形或悬空重量的改变来提供约束张力。系泊系统通常包含绞车、导缆设备、系泊线、锚、重力和浮力配件等组成[12]。
-
常见的系泊形式如图5所示。对于立柱式、半潜式和驳船式海上漂浮式风机,常采用的是图5左边所示的悬链线式系泊[13],系泊线通常为钢链结构。钢链由许多链环连接而成,链环分为有档环和无档链环两种,钢链因其制造成本低、工序简单、强度高等优点,成为运用最广泛的系泊材料。系泊线的预张力主要取决于锚链的悬空段,锚链的回复力主要通过锚链悬空段的变化来实现。但是这种系泊方式存在较长的海床平躺段,因此所占据的海床空间较大,重量随着水深增加而急剧增大; 为了克服上述问题,有时可采用图5中间所示的伞型张紧式系泊[14],该系泊线采用钢缆或者其他复合材料。钢缆由钢丝组成,其常见的形式有六股式、螺旋股式、多股式等。同等断裂强度下,钢缆的重量仅为锚链的20%,因此深水系泊系统为了降低系泊重量常采用钢缆系泊。此时系泊线的约束张力主要依赖于缆索的拉伸变形而非悬空段自重,所搭配的海床锚固装置需要承受水平张力之外,还需要承受较大的垂向张力。钢缆成本较钢链高,且材料呈现非线性的力学特征,系泊松弛后重新张紧时,会带来跳跃性的冲击载荷,对缆索强度和疲劳问题带来了较大的威胁。因此,在设计时可结合钢链和钢缆特性进行分段设计,以获得更优的系泊动力性能;对于张力腿式海上漂浮式风机而言,常采用图5右边所示的垂向张力腿系泊[15],该类型的系泊线常采用合成材料。合成材料在系泊系统上的使用日益频繁,合成纤维材料通常有尼龙(聚酰胺)、聚酯、聚丙烯和聚乙烯等。在同等规格下,合成材料制成的缆绳比重小,耐磨性好,有较大的回复力。但以合成纤维为组成成分的缆绳也有其弊端,如缆绳的轴向刚度随轴向张力作用时间发生变化,容易偏移,也容易打滑而产生蠕变,因此每隔几年需要重新张紧调整。该类型系泊与海床的锚固装置需要承受较大的垂向张力。顶部预张力可通到绞盘进行微调节。由于张紧状态使得张力腿的固有频率较高,当在外界激励作用下,如流体引起的涡激振动和二阶和频波浪力等,都有可能引起张力腿发生高频弹振和颤振问题[16],继而发生疲劳损伤。

Figure 5. Common types of mooring lines systems
浮体的系泊线需要通过锚固装置与海床进行连接。根据锚固装置的形式和力学特性,可大致将其划分为以下几类[17](如图6所示)。

Figure 6. Common types of anchors
抓力锚(拖曳嵌入式锚):是目前使用最广泛的一种锚固结构,其部分或全部嵌入海底,主要靠锚的前部结构与土壤的摩擦力来抵抗外力,能承受较大的水平力,但垂向力承受能力不强, 常与悬链线系泊的锚链搭配使用。
重力锚:主要通过压载与海床表面的摩擦力来抵抗锚链的水平张力,通过压载重量来抵抗锚链的垂向张力。随着锚链的垂向张力水平要求的提高,设计的重力锚需要更大的压载体积,而且水平张力通常难以单纯通过压载和海床之间的摩擦力进行平衡。其性能与海床息息相关,限制了其使用范围。
桩锚:通过向海床打入桩基,通过桩基与土壤之间的作用力来提供锚链的水平张力和垂向张力。但是在深水区域作业时,施工费用较高。
吸力锚:类似于桩锚,但中空的钢筒结构的直径要大的多。通过安装于钢筒顶部的人工泵使钢筒内外出现压力差,当钢筒内压力小于钢筒外时,钢筒随即被吸入海底,然后将泵撤走。其能承受系泊线的水平张力和垂向张力。
为了改善系泊线的动力性能,有时需要增设块重和浮力器件进行调节。块重的形式有集中式和分布式。通常而言,安装集中式块重的锚泊的静态响应较佳,而安装分布式的块重的锚泊的动力响应较佳。锚泊线上的浮力器件有:浮筒、浮球和浮箱等。在悬链线锚泊上设置浮力器件可以有效地降低锚泊线的动张力,但通常会降低锚泊的水平刚度。在张力腿上设置浮力器件可抵消锚泊自重,使其成为完全的张力部件。
对于漂浮式风机系泊系统研究,Philippe等人[20]发现在风浪不共线时,漂浮式风机平台的某些运动会对系泊疲劳产生潜在的影响。Karimirad等人[21]对悬链线系泊的立柱型浮式风机进行动力学分析,发现悬链线的惯性和阻尼对锚链的张力会有明显的影响。Yilmaz[22]研究表明系泊阻尼能有效地减少浮体的动力响应,甚至可以减小纵荡响应约40%。宋宪仓等人[23]对半潜型海上浮式平台的耦合运动进行动力学分析,发现二阶差频力对结构物的运动及系泊张力有着明显的影响。
-
海上风机需要通过海底电缆送出电能。相比于固定式风机而言,浮式风机由于支撑平台运动具有一定范围,因此电缆近端需要采用动态海缆技术[24],并且需要利用浮力单元将海缆悬挂,呈现“S”形态,以使得海缆在一定的摆动范围内可随平台运动,起到缓冲的作用,如图7所示。动态海缆跟随浮体运动的过程中,会受到相对运动的海流作用,因此承受较大的弯矩、剪切和扭矩的综合作用,受力特性复杂。

Figure 7. Dynamic cable of floating wind turbines
目前,学术界和工业界对于浮式风机的动态海缆研究缺乏系统性和深入性。在浮式风机一体化计算过程中,绝大多数采用分离的做法,即浮体运动不考虑海缆的存在,忽略海缆与浮体之间的耦合约束。海缆的设计存在极限长度和极限弯曲角度限制,这对浮体的运动,尤其是极端工况下的运动提出了限制性需求。
以日本Fukushima FORWARD 项目为例,日本古河电气工业株式会社和VISCAS公司负责该浮式风机样机项目的电力传输系统子任务。如图8所示,设计在一台半潜型浮式风机和一台立柱型浮式升压站之间采用22 kV的动态电缆进行连接,在升压站与陆上换流站之间采用66 kV的动态电缆。研究发现该动态电缆在设计的过程中需要首先根据特定波浪和浮体运动情况,依次开展静态响应分析、动态响应分析、疲劳分析,以优化动态电缆的设计参数和形态。

Figure 8. Power transmission system in FF project
-
与固定式的海上风机相似,浮式风机服役的海洋环境中同时受到风、浪、流等环境载荷的作用。但浮式风机支撑平台的结构尺寸相比于固定式风机更大,因此其水动力荷载不能完全采用Morison经验公式进行简化计算,而需要采用势流理论甚至计算流体力学的方法。
对于立柱型浮式风机,其重心设计低于浮心,浮体具有自稳特性,水线面较小,因此所受到的波浪荷载也较小。但由于顶部风轮高程较高,在额定风速下,风倾力矩容易导致较大的平台纵摇。通过合理的设计,其平台运动固有周期可以避开一阶波浪力周期范围,也对二阶波浪力不敏感。立柱型浮式平台不同方向的运动之间会有耦合响应。相关的数值和试验研究[25,26]发现当立柱型浮式平台的垂荡周期大约为纵摇周期2倍关系时,会出现明显的垂荡-纵摇耦合效应,继而诱发较大的垂向运动,影响立柱型浮式平台的性能,这种现象称为“Mathieu instability (马修不稳定)”,设计时需要格外注意。另外,由于立柱型浮式风机通常由单立柱构成,因此在海流载荷的作用下容易在立柱主体两侧产生交替性漩涡,使得结构物出现周期性的脉动压力,继而引发涡激运动[27]。由于涡激运动共振时存在“锁频”(Lock-in)现象,其共振的流速范围可能较大,对立柱型浮式风机设计而言,需要格外注意。
对于半潜型浮式风机,其六自由度运动的耐波性适中,通过合理的浮式支撑平台设计,能使得平台运动固有频率避开一阶波浪力峰值频率范围,因此半潜型浮式风机适用的海域和水深范围较广。由于通常的半潜型浮式风机设计中,重心位于浮心之上,且间距并不大,稳性校核时具有极限倾斜角限制。其纵荡/横荡运动固有频率取决于系泊刚度,通常较小,因此可能对二阶差频波浪力敏感[28,29]。同时,差频波浪力会产生定常的平均波浪拖曳力,使得浮体受到非周期的拖曳载荷作用,继而发生平均位置的偏移,这些都需要格外注意。
对于张力腿型浮式风机,该类型平台通过系泊垂向张力平衡浮体的超额浮力。因此,具有较好的垂向运动性能。但是在水平方向,如纵荡、横荡和首摇运动较为柔软,在受到风轮气动推力荷载时,水平运动幅度可能较大,继而会导致各个张力腿受力不均匀而产生耦合垂向运动[30]。另外,由于张力腿型浮式风机的垂向运动固有频率高于一阶波浪力频率区域,但容易发生波浪二阶和频的高频共振。Bae等人[31]对其提出的张力腿型浮式风机进行二阶和频波浪力的分析,发现二阶力和频波浪力对该浮式风机的运动起到明显的影响,尤其在恶劣海况下。
为了优化浮式风机的水动力性能,可通过平台形式优化、吃水调整、锚链调整外,还可通过设置垂荡板等阻尼结构增加运动阻尼,优化水动力响应性能。Rho等人[32]通过缩尺比的立柱型平台模型试验证明,垂荡板具有抑制运动共振响应的特点,在垂荡固有周期附近的减幅作用甚至可达到50%。
海上漂浮式风机的水动力计算主要借鉴于海洋工程结构物水动力计算方法,有:半经验方法,如莫里森法(Morison) ;势流计算方法,如弗汝德-克雷洛夫(Froude-Krylov)力计算方法、边界元法和三维面元法;计算流体动力学方法等。
-
与传统的固定式海上风机相比,漂浮式风机的平台基础约束较弱,导致风轮的气动载荷存在明显的非线性特征。单个海上漂浮式风机的气动特性研究可大致划分为以下三方面:(1)浮式平台基础对顶部风轮的气动性能的影响;(2)风轮气动载荷对平台基础运动的影响;(3)气动载荷与结构振动等动力响应的耦合,即气弹性问题。
对于浮式平台基础运动对风轮气动特性影响的研究。Tran等人[33]使用CFD方法模拟海上漂浮式风机的纵荡和首摇运动过程中的流场变化,发现在风机纵摇的过程中,作用于旋转状态的桨叶的气动载荷明显发生改变,叶尖存在涡脱落。Farrugia等人[34]也同样发现海上漂浮式风机气动载荷的波动与平台的纵荡/纵摇运动有关,气动载荷的波动程度和平台运动速度幅度呈线性关系。另外,由于海上漂浮式风机工作的海域中,常受到波浪的作用导致平台发生运动,因此基础平台的运动不可避免包含波浪频率成分,继而导致浮式风机的气动载荷和功率波动明显包含了波浪频率成分。
气动载荷对浮式风机运动的影响主要可以分为气动激励载荷和气动阻尼载荷。气动激励载荷,如气动推力使得浮式风机的支撑平台发生较大的纵荡和纵摇运动,如图9所示;气动扭矩使得浮式风机发生横摇和首摇运动;Duan等人[36]对模型试验结果进行频域分析,发现激发的浮式风机的平台基础运动带有湍流风的低频成分;气动阻尼力定义为气动载荷作用力变化与受载结构物运动变化关系的描述。Karimirad等人[37]通过数值计算发现,海上浮式风机的气动阻尼力对其机舱纵荡运动有着显著的影响,并且气动阻尼效应在某些工况下甚至比水动力阻尼的作用效果还明显,这一发现使得通常被忽略的气动阻尼问题受到了广泛的关注。Larsen等人[38]发现传统的固定式风机的控制器并不完全适用于海上浮式风机,如果按照固定式风机的控制器参数,海上浮式风机的气动阻尼甚至会出现“负阻尼”效应,这有可能会

Figure 9. Motion of a floating wind turbine driven by environmental loads
导致平台运动不断加剧。
气弹性问题一直都是风力设备研究的重点考虑因素,相比于固定式风机,浮式风机的平台运动更明显,导致气动载荷波动更大,结构惯性载荷更大,导致更加明显的桨叶和塔筒结构振动,甚至引发平台基础的高频运动。Chen等人[39]发现,海上漂浮式的风轮气动特性、桨叶振动与平台运动存在耦合效应,影响结构的振动状态,引起平台呈现高频振动。
当前海上漂浮式风机气动载荷计算方法有叶素-动量法(BEM)、广义动态尾迹(GDW)法、自由涡尾迹(FVW)法以及计算流体动力学(CFD)方法。其中叶素-动量法是当前最普遍采用的方法。
-
在作业过程中,浮式风机承受复杂的环境载荷,且与基础运动、结构振动以及控制系统高度耦合,这表明其数值仿真需要进行高精度的一体化计算。其数值计算方法也从早期的线性频域分析发展到如今的非线性时域分析。也因此越来越多的学者致力于开发适用于海上漂浮式风机的时域数值仿真程序。例如,Withee[40]将广泛运用于航空航天和机械工业的通用多体仿真计算软件ADAMS和气动力、水动力和锚链子程序通过动态链接库技术在时域上进行耦合计算,模拟海上浮式风机时域动力响应行为。相似地,Matha[41]使用通用多体仿真计算程序SIMPACK,并结合气动子程序AeroDyn、水动力子程序HydroDyn和自主开发的锚链子程序,在时域上对海上浮式风机的动力特性进行了研究与分析。Jonkman[42]重新改写了固定式水平轴风机计算程序FAST,并加入自主开发的水动力和锚链子程序,使得FAST软件具有计算海上浮式风机的能力,如图10所示。国内Chen等人自主开发了浮式风机一体化数值仿真程序DARwind[43]。类似的计算软件还有GH Bladed、HAWC2、SIMA等[44]。

Figure 10. 0 Program flow of FAST software
为了验证海上浮式风机一体化仿真程序的准确性,IEA资助了著名的OC3 (Offshore Code Com-parison Collaboration)项目[45],OC4 (Offshore Code Comparison Collaboration Continuation) 项目[46]以及OC5(Offshore Code Comparison,Collaboration, Continued,with Correlation)项目[47]。这些项目的开展,有力地推动了海上漂浮式风机一体化数值计算理论和相关数值程序的发展。
-
与数值计算相比,模型试验往往能够更加真实地反映浮式风机在复杂的海洋环境下的动力响应行为。通常而言,缩尺比模型和实体之间至少需要满足以下三个相似条件:几何相似、运动相似和动力相似。然而,依据现有的技术和设备条件,完全满足所有的相似条件是不切实际的,因此需要抓住主要特性,合理选择以达到预期的试验目的。目前,海上漂浮式风机进行模型试验时需要满足的相似准则主要有:(1)几何相似:物体的形状特征反映物体基本的力学特征。主要为试验对象和环境的线性尺度参数,如长宽高、吃水深度、重心高度等;(2)傅汝德数相似(Froude): 表征为流体内的惯性力和重力的比率。由于波浪载荷对于浮体运动的影响比粘性水动力载荷影响更加明显,因此需要考虑波浪力的准确模拟;(3)斯特劳哈尔(Strouhal)数相似:浮体在波浪上的运动和受力以及风轮的旋转运动带有周期变化性质,因此需要保证周期性特性不变;(3)雷诺数(Re)相似:风机气动试验侧重于雷诺数相似,即流体内惯性力与粘性力的比率相似,以正确模拟桨叶的气动力和气体流动状态为主。
Fowler等人[48]发现模型桨翼的流体流动状态将会从原尺度的湍流状态变成模型尺度的层流状态,导致模型桨叶功率系数和推力系数降低。因此,浮式风机的模型试验的难点始终围绕着模型的气动性能的改善问题,以尽可能地与原型匹配。早期,一些模型试验采用圆盘等效风轮,主要以气动推力的模拟为主,但这种方法忽略了风轮系统的扭矩、陀螺力矩等气动特性。代表性试验如2010年Principle Power公司开展的WindFloat浮式风机模型试验[49],如图11(a)所示。后来,一些模型试验放弃了风速相似的限制条件,通过调整风速匹配模型的气动载荷,但该方法无法保证非旋转体,如水面以上的平台和塔筒的气动载荷和流场状态相似,代表性试验如2011年至2012年,在OC4项目资助下,美国缅因州大学在荷兰MARIN水池开展的三种浮式风机模型试验[50], 如图11(b)所示。后来,该项目组放弃了桨叶的几何相似,重新设计了适应低雷诺数模型环境的桨叶翼型。国内的Duan[51]和Chen[52]等人也进行了类似试验。虽然上述改变桨叶翼型的方法提高了模型桨叶在低雷诺数模型环境下的气动性能,但整体的质量分布发生了改变,因此改变了原设计的浮式风机的质心和惯性矩特性。

Figure 11. Model basin tests of floating wind turbines
为了修正浮式风机模型试验中雷诺数不相似导致的气动特性差异而又不影响原设计模型的质量分布特性。Thomas Sauder等人[53]对无桁架的半潜型浮式风机Semi-submersible 5MW-CSC 浮式风机开展了实时混合模型试验(ReaTHMTM testing)。在该实验中,浮式风机的风轮、机舱和伺服系统均采用数值仿真的方式,其余结构,如平台、系泊系统、塔筒等以缩尺比物理模型(1:30)进行水池试验。数值模型和物理模型通过传感器、通信网络和执行器等进行实时的交互。整个试验的原理过程如图12所示。上述的实时混合模型试验较好地解决了海上漂浮式风机质量控制困难、气动特性模拟困难等问题,但上述试验方法仍具有一定缺陷,如:来流风场是通过数值程序生成,采用了简化的理论计算方法,缺乏全风场信息、气动载荷计算采用AeroDyn数值程序,算法原理是BEM和GDW方法,计算精度可能不足,试验过程的数据采集、传输和数值模拟均具有一定的时间延迟误差等。

Figure 12. Real-time hybrid model testing
-
目前,浮式风机的平台基础制造还是以钢质材料为主。但近些年,已有部分设计提出以预应力混凝土作为浮式基础平台的主材料。整个平台的制造过程可在船厂等陆上基地进行,标准化的流水线作业和大规模生产可大幅度降低制造成本。浮式平台基础重量大多在2 000 t以上,混凝土材料可达10 000 t以上。相比于固定式风机,浮式风机在浅水区域并不具有经济优势,但其平台重量对水深变化不敏感,因此在深远海域逐渐凸显其成本优势。
另外,半潜型和张力腿型浮式风机能够在港口码头完成基础平台、塔筒和风机的组装工作,而不必像固定式风机那样在海上通过大型浮吊等设备进行复杂的海上安装作业。半潜型浮式风机对运输工具要求较低,通常简单的拖船即能将其运输到预定机位点进行海上锚定。运输的过程常采用湿拖的方式,并且为浅吃水状态,因此拖航过程需要预先进行稳性校核以防倾覆,并对拖航时的海况有窗口期要求。对于立柱型浮式风机,由于吃水较深,拖航过程需要特别考虑航道水深。对于张力腿型浮式风机,由于不具有自稳性,因此多用干拖方式,对运输船只稳性要求较高,海上施工安装也较为复杂,如图13所示。

Figure 13. Manufacture, installation, and transport for a floating wind turbine
浮式风机的日常维护工作与固定式风机类似。但浮式风机与系泊系统解脱后具有拖航移动特性,大多数的浮式风机主体都可以通过拖航回港可实现港口维修,也可以拖航到别的海域进行重新部署使用。因此相比于固定式海上风机,浮式风机的运维方式体现出更多的便捷性。
1.1 稳性校核研究
1.2 系泊与动态海缆研究
1.2.1 系泊系统
1.2.2 动态海缆
1.3 水动力特性研究
1.4 气动力特性研究
1.5 一体化计算
1.6 模型试验研究
1.7 制造与施工安装
-
当前,海上漂浮式风机依然存在相关政策、产业链和技术方面的问题,最终导致相对高昂的建设成本问题,阻碍其商业化的发展。
在政策层面上,目前大多数国家并没有将浮式风电与固定式海上风电从海上风电的统一概念中区别开,以进行不同的补贴政策,而更多以科研性质的基金给予单个或小批量样机测试的资助。导致相关的产业链发展的积极性不足,商业化的浮式风电场成本下降缓慢。目前,苏格兰是全世界唯一给予浮式风电场特别补贴的地区[55]。英国也率先提出对海上风电差价合约进行修改,将浮式海上风电与固定式海上风电区分开,以便作为独立的合格技术竞标,享受独立的执行价格。世界上首个浮式风电场Hywind Scotland Pilot Park在苏格兰东北海岸成功建成并网。该浮式风电场由挪威石油公司投资,由5台6 MW立柱型浮式风机Hywind组成,工作水深为95~120 m,占海域约4 km2,投资约20亿挪威克朗。该漂浮式风电场从2017年运行以来表现稳定,发电量超预期[56]。
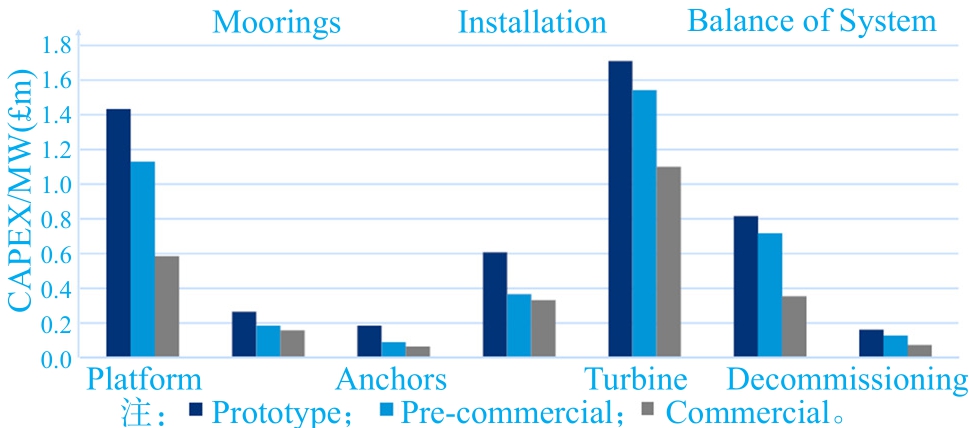
据统计,浮式风电场的费用成本组成如图14所示,费用结构中成分最大的为风机设备费用 (41%),其次为平台基础费用(22%),接着,是相关的配套电器设备成本(13%)和安装施工费用(13%)。相比于固定式海上风机的费用结构,浮式风机具有更少的施工安装成本比例,但是多了相关压载和系泊系统成本。通过未来的商业化发展,相关的工业链日趋成熟,浮式风电的费用将会进一步下降,降本增效的潜力将主要来源于风机、浮式平台的设计优化,创新的施工安装方法和标准化制造流程,如图15所示。

Figure 14. Cost structure of a floating wind turbine farm

Figure 15. CAPEX breakdown by component for different deployment scales
在技术层面上,浮式风机的基础平台主要参考浮式油气平台的设计,但是两者的安全级别和用途具有差异性,因此平台基础仍然具有较大的优化空间。浮式风机的控制系统由于平台运动与气动载荷耦合导致的“气动负阻尼”问题[38],也将挑战相关控制系统的开发。由于水平气动推力的作用,浮式风机将不可避免产生平均位移偏置和倾斜,使得系泊系统产生不均衡的张力状态,这也有别于传统油气工业的浮式系统;诸如等等。
面对这些工程技术挑战,浮式风机设计现阶段却面临规范缺失与不完善问题。目前针对浮式风机的零星的规范大多以简略的介绍性内容为主,主要的规范有:美国船级社ABS Guideline #195[57]、法国船级设船级社NI572-FOWT-10-2015[58]、国际电工委员会IEC TS 61400-3-2:2019[59]、挪威船级社DNVGL-RP-0286[60]、DNVGL-SE-0422[61]等。在设计过程中,如环境荷载计算、稳性校核、平台基础设计、系泊设计、海缆设计、安装维护等主要参考船舶、海洋油气和固定式海上风机的规范为主。
-
目前,漂浮式风机样机测试项目主要集中在欧洲地区,以苏格兰、葡萄牙和地中海区域为主,技术研发和设计则主要集中于挪威、法国、葡萄牙、英国、美国和日本等发达国家[55]。
2009年,挪威国家石油公司率先开展了世界上首台实尺度的海上浮式风机样机实测项目。该项目采用了立柱型海上浮式风机Hywind[62](如图16所示),部署地点距离挪威西南海岸线10 km处,单机发电功率为2.3 MW,作业水深达到200 m,总投资约为4亿挪威克朗。挪威国家石油公司对Hywind的动力性能进行了详细测量记录,并对相关浮式风机安装运维积累了宝贵的工程经验。

Figure 16. Hywind demo project in Norway
2011年,法国电力公司EDF和美国Proinciple Power公司在距离葡萄牙海岸4 km的海域安装了额定功率为2 MW的半潜式海上浮式风机WindFloat[63],如图17所示。相比于传统的固定式海上风机较为繁琐的海上部署与安装流程,WindFloat海上浮式风机借助其半潜式平台良好的稳性特点,成为世界上首台可以在陆地上完成所有组装和调试,且在海上不使用重型吊船或桩基设备的商业化海上风机。

Figure 17. WindFloatdemo project in Portugal
2013年到2015年,由日本产业经济省出资,东京大学、三菱重工、日立、三井造船等单位组成的联合体开展了名为“Fukushima FORWARD”的福岛海上浮式风电场测试项目[64](如图18所示)。该项目在福岛海域先后实测了一台2 MW的三立柱型半潜式浮式风机,一台7 MW的V型半潜型浮式风机,一台5 MW的阶梯状立柱型浮式风机Advanced Spar以及世界首个浮式变电站(25 MVA)。该项目以测试样机性能、测量数据为主,为日后开展更大规模的离岸海上浮式风电场做经验储备。

Figure 18. Floating wind turbines demo project in Fukushima, Japan
Floatgen项目是法国第一个浮式风机试验项目[65](如图19所示),于2013年启动,2017年底安装完毕,2018年开始进行样机运行测试。该样机部署于法国布列塔尼半岛南部的卢瓦河大区比斯开湾北部,离岸距离20 km,水深33 m。浮式平台采用混凝土材质的驳船型浮式风机基础Damping Pool,部署样机容量2 MW,通过六根聚酯系泊缆实现半张紧系泊定位。据公开数据显示,2019年上半年,样机发电量2 GWh,经受了11.7 m波高海况的考验。

Figure 19. DampingPool demo project in France
-
海上漂浮式风机的潜在市场以欧洲、美国、亚洲沿海国家为主。欧洲市场不仅具有装机容量最大的固定式海上风电市场,同时也是浮式风电的主要研发、测试和商业开发地区。截止2019年底,欧洲漂浮式风电装机容量占全球70%,达45 MW[66]。主要的欧洲国家有英国、葡萄牙、西班牙、德国、法国和挪威等。预计,在未来三年,欧洲浮式风电装机容量将加速增长,预计投运规模可达274 MW。其中,葡萄牙的Windfloat Atlantic Phase 1项目预计将在2020年投运3台单机8.4 MW的半潜型浮式风机。英国Kincardine项目预计将在2021年投运5台单机9.5 MW的半潜型浮式风机。挪威Hywind Tampen项目将在2022年投运11台单机8MW的立柱型浮式风机。法国在2021年到2022年期间预计有4个主要的浮式风电项目,含24 MW的驳船型浮式风机项目EolMed,28.5 MW的张力腿型浮式风机项目Provence Grand Large和Eoliennes Flottantes de Groix,以及30 MW的半潜型浮式风机项目EFGL[66]。美国的风电市场当前主要以陆上风电场为主,但是美国相关高校和研究机构在浮式风电技术上和欧洲一起处于领先地位,潜在运用市场以美国西海岸为主。亚洲国家中,日本是唯一的开展过相关样机试验的国家,也是唯一开展过浮式升压站的国家。日本在经历了福岛核事故之后,积极地寻求安全的可再生的能源转型之路,作为一个岛屿国家,日本发展浮式风电具有重要的现实意义。同样,目前计划开展浮式风机样机项目的亚洲国家还包括韩国和中国。对于中国,由于大陆架变化较缓,目前以中浅海域为主,因此对于过渡水深范围(40~60 m)的浮式风电技术更为迫切。
除了利用浮式风机进行传统的并网输电之外,不少研究者还提出利用浮式风机对远洋油气开采平台、可燃冰开采平台、海底矿能开采设施等提供就近的电力输送;将浮式风机与远洋养殖业结合,为远洋养殖鱼箱提供主体结构的同时,也为相关设备提供电力;甚至于,将浮式风电与制氢结合,从而避免电力的远距离输送问题;诸如等等。
2.1 工程挑战
2.2 工程案例
2.3 未来展望
-
近年来,海上漂浮式风电技术伴随全球海上风电商业化开发热潮而日趋成熟,并处于商业化起始阶段。对于中国海上风电行业而言,开展浮式风电技术研究和工程化实践,有助于拓展海上风电空间范围,是海上风电行业可持续发展的重要方向,也是我国未来保持海上风电产业竞争优势的重要抓手。
本文综述了海上漂浮式风机基本形式,关键技术研究现状,相关工程挑战,工程样机案例和未来展望分析。对我国现阶段的漂浮式技术研究和相关工程项目开展提供了较为全面的技术参考。

 DownLoad:
DownLoad: